Robô Autônomo Transistorizado
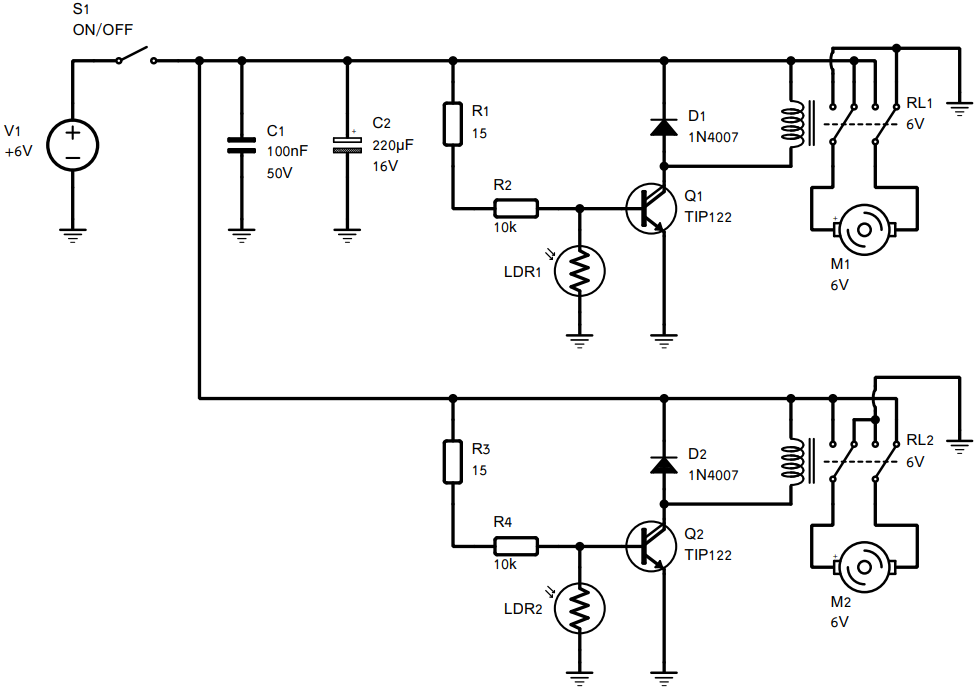
A robótica traz o fascínio para muitas pessoas. Aos estudantes e profissionais em Eletrônica não poderia ser diferente. Aliando Eletrônica, Mecânica, entre outras áreas importantes do conhecimento, a robótica nos possibilita desenvolver dispositivos incríveis que têm condições de avaliar o ambiente em que se encontra e efetuar tomadas de decisão de acordo com os parâmetros recebidos. Este é o propósito do projeto do presente artigo, que consiste em um robô móvel autônomo, capaz de detectar obstáculos e realizar o desvio necessário, para que possa se locomover sozinho. Como o propósito deste artigo é atender aos iniciantes, optou-se por utilizar um hardware simples, contendo dois transistores, dois LDRs e mais alguns componentes. O circuito completo de controle do robô pode ser visto na Figura 1.

Como pode-se perceber, todos os componentes são simples e o leitor poderá adaptar o circuito para sua necessidade. Vamos agora entender como funciona. O circuito é alimentado com 6V que poderá vir de um conjunto de 4 pilhas alcalinas do tipo AA de 1,5V. Ao fecharmos a chave S1 ligaremos a unidade. Os capacitores C1 e C2 são para filtragem da fonte, sendo C1 para frequências mais altas. O restante do circuito consiste em uma lógica dupla para controlar dois motores DC de forma independente.
Os sensores utilizados para detecção de obstáculos são LDRs (light dependent resistor) ou resistor dependente de luz. Quanto maior a incidência de luz no LDR, menor é a resistência entre os seus terminais. Portanto, podemos concluir que em condições normais, haverá luz em ambos os LDRs e o robô irá se mover sempre para frente. Entenda que, havendo luz os LDRs manterão os transistores Q1 e Q2 cortados, pois teremos uma tensão bem próxima de zero em suas bases. Os relés são pequenos e contém chaves HH (dois polos e duas posições). Este fato possibilita a inversão de sentido de giro de cada motor de forma independente (analise as ligações no esquemático).
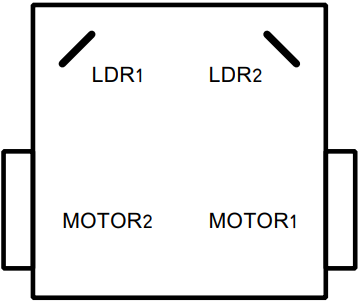
Os LDRs deverão ser posicionados em um ângulo de 45° na parte frontal do robô e controlando o seu respectivo motor no lado oposto, conforme Figura 2.
O robô está se movendo para frente e recebendo luz em ambos os LDRs, agora imaginemos que o mesmo se depare com um obstáculo à sua esquerda. O LDR1 receberá menos luz pois o obstáculo vai diminuir esta incidência. Neste momento LDR1 terá um aumento em sua resistência e a malha formada por R1 e R2 vai saturar Q1, disparando o relé RL1. A consequência disso é a inversão de sentido de giro do motor 1, fazendo a mudança de direção do robô, afastando-o do obstáculo e tendendo a mover-se para sua direita. A lógica é a mesma para o conjunto LDR2 e M2. No lugar de R1 e R3 pode-se colocar trimpots de 470 Ohms, para serem utilizados como ajuste de sensibilidade dos sensores. Optamos por resistores fixos de 15 Ohms pois este foi o melhor ajuste obtido na prática, sendo que o robô funcionou perfeitamente.
Para a mecânica do robô, pode-se construir qualquer chassi contendo dois motores com duas caixas de redução (existem muitas opções para compra em lojas de robótica).
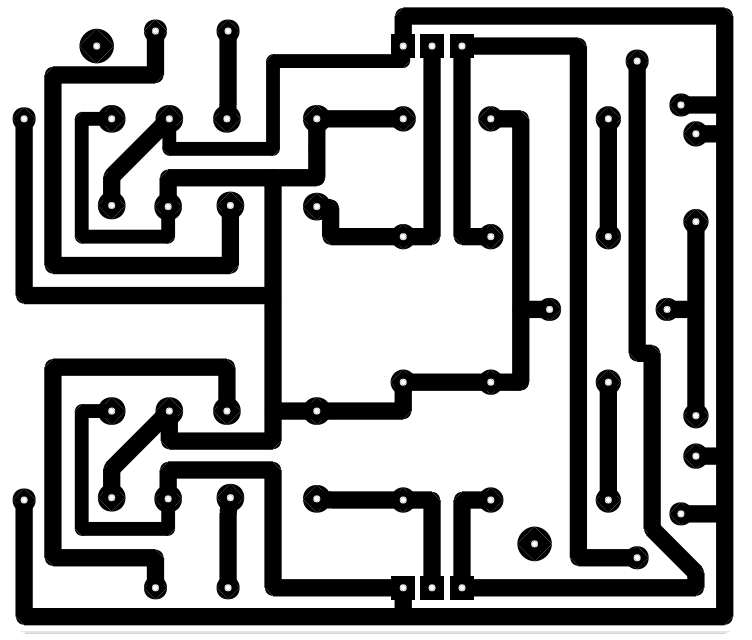
Uma sugestão de placa de circuito impresso por ser vista na Figura 3.

Na Figura 4 apresentamos o lado do cobre, como pode-se observar, a PCB pode ser confeccionada em face simples, dada a simplicidade do circuito.
Abaixo a lista de componentes para o circuito do robô.
– 2 transistores Darlington TIP122 (Q1 e Q2);
– 2 diodos 1N4007 (D1 e D2);
– 2 LDRs de 5mm (LDR1 e LDR2);
– 1 capacitor cerâmico ou de poliéster de 100nF (C1);
– 1 capacitor eletrolítico de 220µF (C2);
– 2 resistores de 15 Ohms 1/4W (R1 e R3);
– 2 resistores de 10k 1/4W (R2 e R4);
– 1 terminal comum para uso como jumper na PCB;
– 2 motores DC de 6V;
– 1 chave ON/OFF;
– 1 suporte para 4 pilhas AA;
– 2 relés HH de 6V;
– Diversos: PCB, fios para solda, partes mecânicas, ferramentas, etc.















")








{kind=link}