
Microcontrolador Arduino Vs PIC tudo o que você precisa saber
Conteudo
Microcontrolador Arduino vs PIC:
Arduino Vs PIC- Neste artigo, vamos comparar o Microcontrolador PIC com a Placa Arduino que é baseada no Microcontrolador Atmega328. Para melhor entendimento primeiro explicarei o que é o Microcontrolador PIC, sua descrição dos pinos e depois explicarei a placa Arduino. Por fim, ao final, vamos comparar o Arduino e o Microcontrolador PIC.
Microcontrolador PIC:
O microcontrolador PIC é uma família de microcontroladores fabricados por microchip isto significa que o microcontrolador IC é um produto de um microchip. Se você analisar este nome PIC, obteremos P para periférico, I para a interface e C para o controlador. Portanto, o significado completo de PIC é o controlador de interface periférica . Agora vou dar um exemplo para que você possa entender a principal razão por trás do nome do PIC. Então, em primeiro lugar, suponha que você queira ligar e desligar as luzes e os ventiladores usando os botões do teclado do computador “A” e “B”, mas como isso é possível porque o teclado é um dispositivo analógico e o computador é um dispositivo digital isso é possível se você usar um terceiro dispositivo como uma unidade e este dispositivo for umMicrocontrolador PIC . Este dispositivo atua como uma unidade entre o teclado e o computador. O microcontrolador pic conecta e controla o computador e o teclado com a posição entre eles. Primeiro, veremos os membros da família de microcontroladores PIC o microcontrolador PICfamília de produtos atualmente consiste em 6 grupos. Agora vou lhe dizer os nomes de seis grupos de microcontroladores. Então o primeiro é PIC 10FXXX este microcontrolador pode trabalhar com programa de 12 bits, o segundo é PIC 12CXXX ou PIC 12FXXX este microcontrolador tem memória de programa de 12 ou 14 bits, o terceiro é PIC 16C5X este microcontrolador também pode receber palavra de programa PIC , o quarto é PIC 16CXXX ou PIC 16FXXX microcontrolador deste modelo pode receber um programa de 14 bits, o quinto é PIC 17CXXX e este microcontrolador pode receber programador de 16 bits e o último é PIC 18CXXX ou PIC 18FXXX e este microcontrolador pode levar programador de 16 bits. Este XXX significa que você pode usar três números no espaço XXX como o nome da série do modelo.
Agora apresento a você os membros da família de microcontroladores PIC 16FXXX. então o primeiro IC é PIC16F84 ou PIC16F84A este tipo de IC tem 18 pinos então o segundo é PIC16F88 e este também tem 18 pinos então o terceiro é PIC16F72 ou 16f73 e este IC tem 28 pinos e o quarto ic é PIC16F877 ou PIC16F877A e este tem 40 pinos. Este IC é atualmente o maior IC desta série PIC.
Descrição do pino:
Agora vamos discutir a descrição do pino do PIC16F877A. É um microcontrolador de 8 bits baseado em flash CMOS baseado na poderosa arquitetura PIC de microchips.
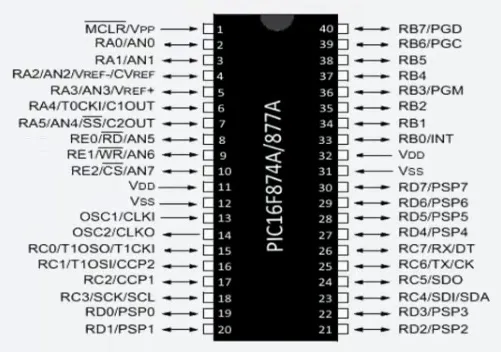
Tem um número total de 40 pinos, dos quais a porta A tem 6 pinos, a porta B, a porta C e a porta D têm 8 pinos cada e a porta E tem 3 pinos. Portanto, da Porta A à Porta E, temos um total de 33 pinos de entrada e saída. Depois disso, temos dois pinos de VDD, dois pinos para VSS, um pino para MCLR que é o pino mestre do microcontrolador. Então temos um pino para OCS1 e um pino para OCS2 onde OCS1 é a entrada do oscilador e OCS2 é a saída do oscilador. Estes são os pinos onde o oscilador de cristal está conectado. O microcontrolador PIC também consiste em pinos especiais como o RX e o TX. O RX é entrada serial e TX é saída serial. Juntos, esses dois pinos são usados para comunicação serial assíncrona com os dispositivos seriais. Depois disso, temos os pinos SCL e SDA onde o SDA é um dado serial e o SCL é um relógio serial. Esses dois pinos do I2C de dois fios ou circuito integrado do microcontrolador PIC. Então temos os quatro pinos SD0, SDI, SCK e o pino SS. Esses quatro pinos formam a interface periférica SPI ou serial do microcontrolador pic. Agora de AN0 para AN7, temos ADC de 10 bits o conversor analógico para digital. Então temos RB0 que é o pino de interrupção externo para o microcontrolador pic. CCP1 e CCP2 são os dois módulos PWM. PC0 a PC7 temos a porta paralela escrava com leitura e escrita externa e controle CS. A porta paralela escrava é de 8 bits. Então temos RB0 que é o pino de interrupção externo para o microcontrolador pic. CCP1 e CCP2 são os dois módulos PWM. PC0 a PC7 temos a porta paralela escrava com leitura e escrita externa e controle CS. A porta paralela escrava é de 8 bits. Então temos RB0 que é o pino de interrupção externo para o microcontrolador pic. CCP1 e CCP2 são os dois módulos PWM. PC0 a PC7 temos a porta paralela escrava com leitura e escrita externa e controle CS. A porta paralela escrava é de 8 bits.
Arduíno :
Um microcontrolador atmega328 é fabricado pela ATMEL fazendo você entrar tensão de cerca de 7 volts ou 12 volts para esta porta. A tensão de operação do microcontrolador é de 5 volts, ele tem uma velocidade de CPU de 16 megahertz. Existem entradas analógicas ou pinos de saída que são em número de 6.

Existem 14 pinos de entrada/saída digital, dos quais 6 podem ser usados para modulação de largura de pulso. A principal característica desta modulação por largura de pulso é que ela pode ser usada para variar a intensidade ou a velocidade que possui uma EEPROM de 1 kb SRAM de 2 kb de memória flash de 32kb que pode ser usada para armazenar o programa ou carregar o programa. UART universal uma transmissão de recepção síncrona de 1 tipo USB é regular tem um pino de reset que quando pressionado o programa vai iniciar a partir da primeira linha. Os pinos A4 e A5 que são pinos analógicos possuem entrada SDA e SCL que podem ser usados para receber uma configuração de relógio em tempo real quando usado com ds1307. Os pinos digitais 0 e 1 são usados para comunicação serial 0 para recepção e 1 para transmissão os pinos 2 e 3 que são digitais também podem ser usados para fins de interrupção.
Descrição do Atmega 328P:
Atmega328 é um microcontrolador CMOS de 8 bits de baixa potência baseado em arquitetura AVR aprimorada. Tem um número total de 28 pinos, dos quais 14 são pinos de entrada de saída digital de D0 a D13. Também possui 6 canais ADC de A0 a A5 que formam o conversor analógico para digital do atmega328. Também possui 6 canais pwm e dois pinos para XTAL1 e XTAL2.
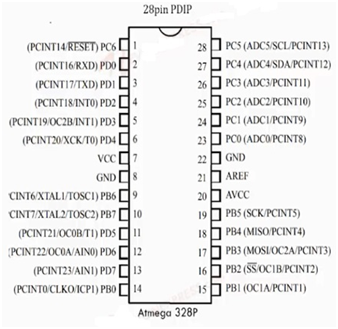
Dois pinos para terra. Pino número 7 e pino número 20 para VCC. Pino número 21 para referência analógica. Um pino para redefinir a entrada habilitada para baixo. Então, quando isso ativado, vá para baixo, o microcontrolador reinicia e o programa do microcontrolador também é reiniciado. Um pino para RXD e um pino para TXD. O RXD e o TXD formam a entrada de comunicação serial do microcontrolador. O atmega328 também possui alguns pinos especiais como SCK, que significa relógio serial, MISO significa entrada mestre, saída escrava, MOSI, saída mestre, entrada escrava, SS, seleção de escravo. Juntos, esses quatro pinos formam a interface periférica serial do atmega328. Depois disso temos SCL e SDA que são o relógio serial e os dados seriais que formam a porta I2C do atmega328. A tensão de operação deste microcontrolador varia de 1,8V a 5,5V, mas normalmente usamos 5V para esse fim. Ele pode ser combinado com o oscilador de cristal de 16 Mhz junto com o capacitor de 22pF para formar o circuito do oscilador de cristal. Temos 32 KB de memória flash, 2 KB de SRAM e cerca de 1 KB de EEROM.
Arduino VS PIC:
Agora vamos comparar o microcontrolador PIC e o Arduino UNO. Em primeiro lugar, o Arduino não é realmente um microcontrolador, é uma placa de microcontrolador ou placa de desenvolvimento. Ele tem um microcontrolador AVR atmega328 nele. Microcontrolador PIC é uma família de microcontroladores feitos por microchip. Eles são vendidos principalmente como chips e precisamos colocá-los em uma placa de circuito por um soquete sap e alguns cabos também são necessários programadores externos como pick it 2 ou pick 3 para programar o microcontrolador usando MPLAB X IDE. O software tem menos bibliotecas em comparação com o Arduino UNO.

O Arduino UNO é, no entanto, muito econômico em comparação com o PIC e vem em plataformas cruzadas de hardware de código aberto também estão disponíveis, pois você pode programá-lo no Windows Linux e Mac, enquanto a maioria dos microcontroladores pic são programáveis apenas na configuração do Windows. O Arduino pode ser conectado ao computador usando um cabo USB. O Arduino possui outro microcontrolador que atua como programador, portanto, não requer um dispositivo externo para programação. O ambiente de programação é muito fácil de usar mesmo para iniciantes a biblioteca de exemplos também está presente no IDE. Então, tudo o que você precisa é de um cabo USB do software Arduino e da placa Arduino.

O microcontrolador PIC é um programa desenvolvido utilizando o software MPLAB X. O software MPLAB X é uma ferramenta gratuita, como o Arduino IDE, mas você mesmo deve escolher o compilador. Precisamos de mais ferramentas para o microcontrolador pic. Enquanto no Arduino, precisamos apenas de uma placa Arduino, software Arduino e cabo USB. Às vezes não precisamos de um cabo USB porque o software está nele.
Características do microcontrolador PIC:
| Frequência de operação | 48MHz |
| Memória do programa | 32 Kb |
| Memória de programa (instrução) | 16 Kb |
| Memória de dados | 2 Kb |
| Dados EEPROM | 256 |
| Fontes de interrupção | 20 |
| Portas de E/S | Porta A, B, C, D, E |
| Temporizadores | 4 |
| Módulos PWM | 1 |
| Comunicação em série | MSSP, USART aprimorado |
| USB | 1 |
| Transmissão de porta paralela | sim |
| Módulo analógico para digital de 10 bits | 13 canais de entrada |
| Comparadores | 2 |
| Pacotes | 40 pinos PDIP44 pinos QFN 44 pinos TQFP |
Características do arduino:
| Tensão operacional | 5 V |
| Tensão de entrada | 7 – 12 V |
| Pinos de E/S digitais | 14 |
| Pinos de entrada analógica | 6 |
| Corrente CC por E/S | 40 mA |
| Corrente DC para pino de 3,3 V | 50 mA |
| Memória flash | 32 Kb |
| SRAM | 2 Kb |
| EEPROM | 1 KB |
| Velocidade do relógio | 16MHz |
| Temporizadores | 4 |
| Módulos PWM | 6 |
| comunicação | Serial, UART, TTL, SPI |
Arquitetura:
Ambas as plataformas RISC de 8 bits, portanto, a arquitetura base é a mesma. Os PICs são mais antigos, então eles têm mais heranças em termos de conhecimento, mas também são tecnologia mais antiga e não estão se saindo bem em relação ao custo de hardware mais recente. Os AVRs são mais novos e rodam mais rápido com mais recursos e têm suporte de ferramentas de código aberto (como o compilador GCC) e têm ferramentas baratas como o programador e o depurador Dragon.
Não notamos nenhuma diferença quando estivermos conectando relés, botões ou leds, mas quando usarmos projetos complexos como interface de hardware, comunicação de dados e processamento de grandes dados, etc, sentiremos a diferença entre o arduino e o PIC. Os PICs têm muitas informações legadas por aí, mas os AVRs têm ferramentas baratas que facilitam as coisas (o PIC não possui um bom compilador de código aberto AFAIK) que com projetos intensivos de código pode ser útil. É por isso que coisas como a plataforma Arduino podem existir.
Qual microcontrolador é melhor?
O Arduino é melhor porque é amigável em comparação com o microcontrolador PIC, pois se quisermos carregar o programa no Arduino, basta clicar no upload no IDE do Arduino, enquanto no caso do PIC realizaremos etapas complexas para fazer o upload do código no controlador também Arduino é útil em projetos complexos.














{kind=link}