
O que é microcontrolador PIC e sua arquitetura
O microcontrolador PIC foi desenvolvido no ano de 1993 pela tecnologia de microchip. O termo PIC significa Peripheral Interface Controller. Inicialmente foi desenvolvido para suportar computadores PDP para controlar seus dispositivos periféricos e, portanto, nomeado como um dispositivo de interface periférica. Esses microcontroladores são muito rápidos e fáceis de executar um programa em comparação com outros microcontroladores . A arquitetura do microcontrolador PIC é baseada na arquitetura Harvard. Microcontroladores PIC são muito populares devido à sua facilidade de programação, ampla disponibilidade, fácil interface com outros periféricos, baixo custo, grande base de usuários e capacidade de programação serial (reprogramação com memória flash), etc.
Sabemos que o microcontrolador é um chip integrado que consiste de CPU, RAM, ROM, temporizadores e contadores, etc. Da mesma forma, PIC microcontrolador arquitetura consiste de RAM, ROM, CPU, temporizadores, contadores e suporta os protocolos tais como SPI, CAN e UART para interface com outros periféricos. Atualmente os microcontroladores PIC são amplamente utilizados para fins industriais devido ao baixo consumo de energia, alta capacidade de desempenho e facilidade de disponibilidade de suas ferramentas de hardware e software de suporte, como compiladores, depuradores e simuladores.
Conteudo
O que é um microcontrolador PIC?
Os microcontroladores PIC (Programmable Interface Controllers) são os menores microcontroladores do mundo que podem ser programados para realizar uma grande variedade de tarefas. Esses microcontroladores são encontrados em muitos dispositivos eletrônicos, como telefones, sistemas de controle de computador, sistemas de alarme, sistemas embarcados , etc. Existem vários tipos de microcontroladores , embora os melhores sejam encontrados na linha GENIE de microcontroladores programáveis . Esses microcontroladores são programados e simulados por um software de assistente de circuito.
Toda arquitetura de microcontrolador PIC consiste em alguns registradores e pilha onde os registradores funcionam como memória de acesso aleatório (RAM) e a pilha salva os endereços de retorno. As principais características dos microcontroladores PIC são RAM, memória flash, temporizadores/contadores, EEPROM, portas de E/S, USART, CCP (módulo de captura/comparação/PWM), SSP, comparador, ADC (conversor analógico para digital), PSP ( paralelo porta escrava), LCD e ICSP (no circuito de programação serial) O microcontrolador PIC de 8 bits é classificado em quatro tipos com base na arquitetura interna, como Base Line PIC, Mid Range PIC, Enhanced Mid Range PIC e PIC18
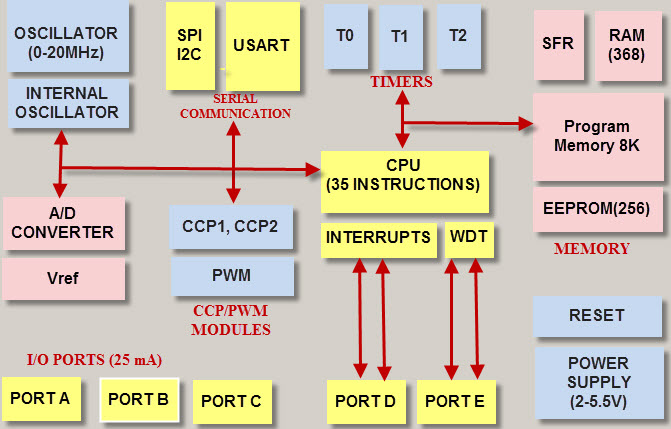
Arquitetura do Microcontrolador PIC
A arquitetura do microcontrolador PIC compreende CPU, portas de E/S, organização de memória, conversor A/D, temporizadores/contadores, interrupções, comunicação serial, oscilador e módulo CCP que são discutidos detalhadamente abaixo.
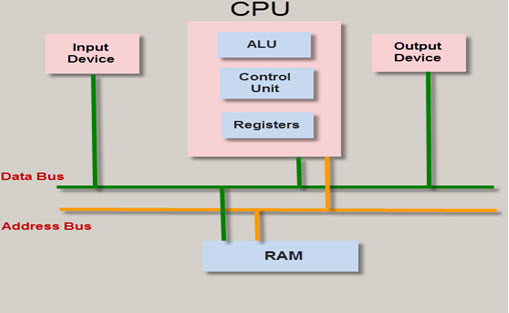
CPU (Unidade Central de Processamento)
Não é diferente da CPU de outros microcontroladores e a CPU do microcontrolador PIC consiste na ALU, CU, MU e acumulador, etc. A unidade lógica aritmética é usada principalmente para operações aritméticas e para tomar decisões lógicas. A memória é usada para armazenar as instruções após o processamento. Para controlar os periféricos internos e externos, são utilizadas unidades de controle que são conectadas à CPU e o acumulador é usado para armazenar os resultados e processos posteriores.
Organização da Memória
O módulo de memória na arquitetura do microcontrolador PIC consiste em RAM (Random Access Memory), ROM (Read Only Memory) e STACK.
Memória de acesso aleatório (RAM)
RAM é uma memória instável que é usada para armazenar os dados temporariamente em seus registradores. A memória RAM é classificada em dois bancos, e cada banco consiste em tantos registradores. Os registradores RAM são classificados em dois tipos: registradores de função especial (SFR) e registradores de propósito geral (GPR)
Registros de Uso Geral (GPR)
Esses registradores são usados apenas para fins gerais, como o nome indica. Por exemplo, se quisermos multiplicar dois números usando o microcontrolador PIC. Geralmente, usamos registradores para multiplicar e armazenar os números em outros registradores. Portanto, esses registradores não têm nenhuma função especial, – a CPU pode acessar facilmente os dados nos registradores.
Registros de Função Especial
Esses registros são usados apenas para fins especiais, conforme o nome SFR implica. Esses registradores funcionarão de acordo com as funções atribuídas a eles e não podem ser usados como registradores normais. Por exemplo, se você não pode usar o registro STATUS para armazenar os dados, esses registros são usados para mostrar a operação ou o status do programa. Assim, o usuário não pode alterar a função do SFR; a função é dada pelo varejista no momento da fabricação.

Memória somente leitura (ROM)
A memória somente leitura é uma memória estável que é usada para armazenar os dados permanentemente. Na arquitetura do microcontrolador PIC , a arquitetura ROM armazena as instruções ou programa, de acordo com o programa que o microcontrolador atua. A ROM também é chamada de memória de programa, onde o usuário escreverá o programa para o microcontrolador e o salvará permanentemente, e finalmente o programa será executado pela CPU. O desempenho dos microcontroladores depende da instrução, que é executada pela CPU.
Memória somente leitura programável apagável eletricamente (EEPROM)
Na ROM normal, podemos escrever o programa apenas uma vez, não podemos usar novamente o microcontrolador várias vezes. Mas, na EEPROM, podemos programar a ROM várias vezes.
Memória flash
A memória flash também é uma memória programável somente de leitura (PROM) na qual podemos ler, escrever e apagar o programa milhares de vezes. Geralmente, o microcontrolador PIC usa esse tipo de ROM.
Pilha
Quando ocorre uma interrupção, primeiro o microcontrolador PIC deve executar a interrupção e o endereço do processo existente. Então o que está sendo executado é armazenado na pilha. Após concluir a execução da interrupção, o microcontrolador chama o processo com a ajuda do endereço, que é armazenado na pilha e executa o processo.
Portas I/O
- A série do PIC16 consiste em cinco portas, como Porta A, Porta B, Porta C, Porta D e Porta E.
- A porta A é uma porta de 16 bits que pode ser usada como porta de entrada ou saída com base no status do registro TRISA (Tradoc Intelligence Support Activity).
- A porta B é uma porta de 8 bits que pode ser usada como porta de entrada e saída.
- A porta C é de 8 bits e a operação de entrada ou saída é decidida pelo status do registrador TRISC.
- A porta D é uma porta de 8 bits que atua como uma porta escrava para conexão com o BUS do microprocessador.
- A porta E é uma porta de 3 bits que serve a função adicional dos sinais de controle para o conversor analógico para digital.
ÔNIBUS
BUS é usado para transferir e receber os dados de um periférico para outro. É classificado em dois tipos, como barramento de dados e endereço.
Barramento de dados: É usado apenas para transferir ou receber os dados.
Barramento de endereço: O barramento de endereço é usado para transmitir o endereço de memória dos periféricos para a CPU. Os pinos de E/S são usados para fazer a interface com os periféricos externos; UART e USART são protocolos de comunicação serial que são usados para interfacear dispositivos seriais como GSM, GPS, Bluetooth, IR, etc.
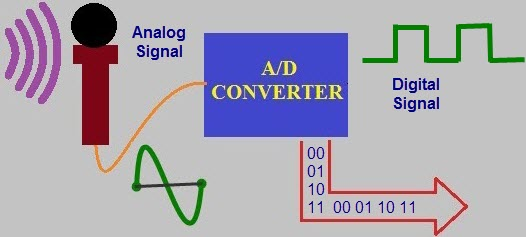
Conversores A/D
A principal intenção deste conversor analógico para digital é converter valores de tensão analógicos para valores de tensão digital. O módulo A/D do microcontrolador PIC consiste em 5 entradas para dispositivos de 28 pinos e 8 entradas para dispositivos de 40 pinos. A operação do conversor analógico para digital é controlada pelos registradores especiais ADCON0 e ADCON1. Os bits superiores do conversor são armazenados no registrador ADRESH e os bits inferiores do conversor são armazenados no registrador ADRESL. Para esta operação, são necessários 5V de tensão de referência analógica.
Temporizadores/contadores
O microcontrolador PIC tem quatro temporizadores/contadores em que um temporizador de 8 bits e os temporizadores restantes têm a opção de selecionar o modo de 8 ou 16 bits. Os temporizadores são usados para gerar ações de precisão, por exemplo, criando atrasos de tempo específicos entre duas operações.
Interrupções
O microcontrolador PIC consiste em 20 interrupções internas e três fontes externas de interrupção que estão associadas a diferentes periféricos como ADC, USART, Timers e assim por diante.
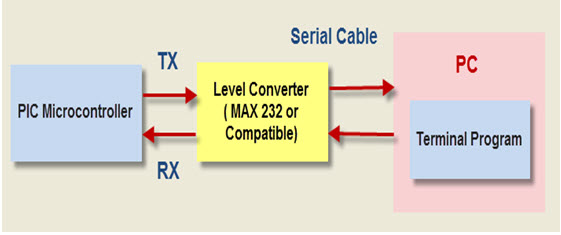
Comunicação em série
A comunicação serial é o método de transferência de dados um bit de cada vez sequencialmente através de um canal de comunicação.
- USART: O nome USART significa Receptor e Transmissor Universal síncrono e Assíncrono, que é uma comunicação serial para dois protocolos. Ele é usado para transmitir e receber os dados bit a bit através de um único fio em relação aos pulsos de clock. O microcontrolador PIC possui dois pinos TXD e RXD. Esses pinos são usados para transmitir e receber os dados em série.
- Protocolo SPI: O termo SPI significa Serial Peripheral Interface. Este protocolo é usado para enviar dados entre o microcontrolador PIC e outros periféricos como cartões SD, sensores e registradores de deslocamento. O microcontrolador PIC suporta comunicações SPI de três fios entre dois dispositivos em uma fonte de clock comum. A taxa de dados do protocolo SPI é maior que a do USART.
- I2C Protocolo: O termo I2C meios Circuito Integrado Inter, e é um protocolo de série, que é utilizado para ligar dispositivos de baixa velocidade, tais como a EEPROM, microcontroladores , A / conversores D, etc. PIC microcontrolador apoio de dois fios ou interface de comunicação I2C entre dois dispositivos que podem funcionar como dispositivo mestre e escravo.
Osciladores
Os osciladores são usados para geração de temporização. O microcontrolador Pic consiste em osciladores externos como osciladores RC ou osciladores de cristal. Onde o oscilador de cristal está conectado entre os dois pinos do oscilador. O valor do capacitor é conectado a cada pino que decide o modo de operação do oscilador. Os modos são o modo de cristal, o modo de alta velocidade e o modo de baixa potência. No caso de osciladores RC, o valor do resistor e capacitor determinam a frequência do clock e a faixa de frequência do clock é de 30KHz a 4MHz.
Módulo PCC
O nome módulo CCP significa capturar/comparar/PWM, onde funciona em três modos, como modo de captura, modo de comparação e modo PWM.
- Modo de Captura: O modo de captura captura o tempo de chegada de um sinal, ou seja, quando o pino do CCP fica alto, ele captura o valor do Timer1.
- Modo de comparação: o modo de comparação funciona como um comparador analógico. Quando o valor do timer1 atinge um determinado valor de referência, ele gera uma saída.
- Modo PWM: O modo PWM fornece saída modulada por largura de pulso com resolução de 10 bits e ciclo de trabalho programável.
Aplicações de microcontroladores PIC
Os projetos de microcontroladores PIC podem ser utilizados em diversas aplicações, como periféricos, acessórios de áudio, videogames, etc. Para melhor compreensão deste microcontrolador PIC, o projeto a seguir demonstra o funcionamento do microcontrolador PIC.
Luz de rua que brilha ao detectar o movimento do veículo:
A principal intenção deste projeto é detectar o movimento de veículos nas rodovias para acender um bloco de iluminação pública à sua frente e também desligar as luzes traseiras para economizar energia. Neste projeto, um microcontrolador PIC é feito usando linguagem assembly ou C embutido.
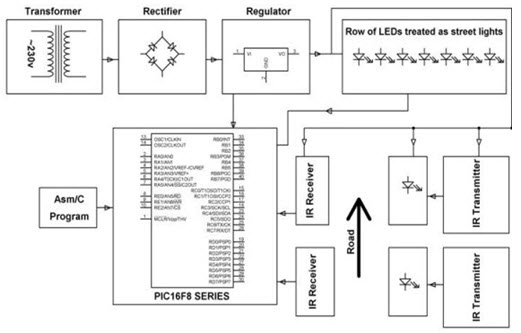
A fonte de alimentação fornece energia para todo o circuito reduzindo, retificando, filtrando e regulando a fonte de alimentação CA. Quando não há veículos na estrada, todas as luzes se apagam para que a energia possa ser conservada. Os sensores IR são colocados na estrada para detectar o movimento do veículo. Quando há veículos na rodovia, o sensor IR detecta o movimento do veículo imediatamente, envia os comandos para o microcontrolador PIC para ligar/desligar os LEDs. Um monte de LEDs será ligado quando um veículo se aproximar do sensor e uma vez que o veículo se afaste do sensor, a intensidade ficará menor do que os LEDs serão desligados
Vantagens do microcontrolador PIC:
- Os microcontroladores PIC são consistentes e a porcentagem de PIC com defeito é muito menor. O desempenho do microcontrolador PIC é muito rápido devido ao uso da arquitetura RISC.
- Ao comparar com outros microcontroladores , o consumo de energia é muito menor e a programação também é muito fácil.
- A interface de um dispositivo analógico é fácil sem nenhum circuito extra
Desvantagens do Microcontrolador PIC:
- A duração do programa é alta devido ao uso da arquitetura RISC (35 instruções)
- Um único acumulador está presente e a memória do programa não está acessível
Consulte este link para saber mais sobre MCQs de arquitetura ARM e MCQs de microcontroladores
Assim, este é tudo sobre o tutorial do microcontrolador PIC que inclui a arquitetura do microcontrolador PIC , vantagens, desvantagens e aplicações. Além disso, para qualquer ajuda em relação a projetos eletrônicos e elétricos, você pode entrar em contato conosco comentando na seção de comentários abaixo.














{kind=link}