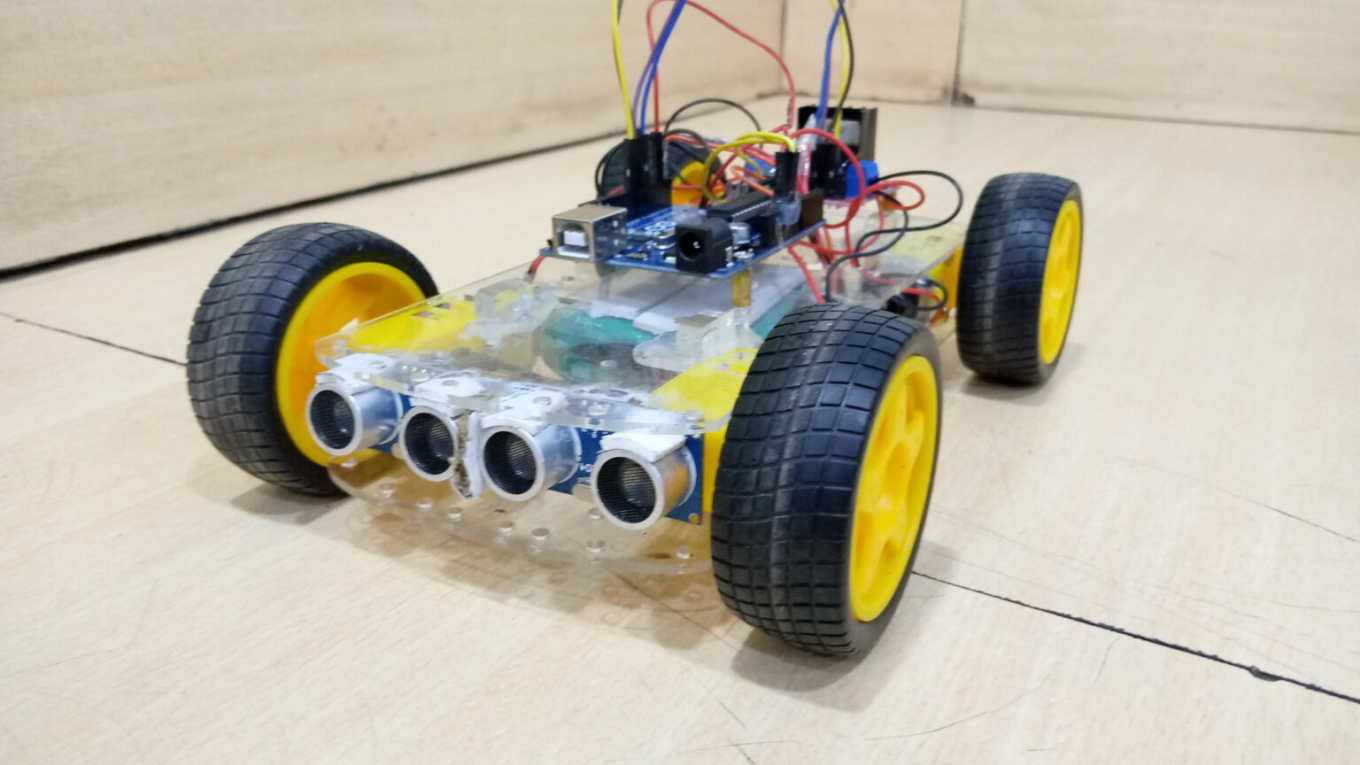
Robô evitando obstáculo usando Arduino – Dois sensores
Existem muitos projetos de robótica em eletrônica, mas o robó para evitar obstáculo é um dos mais atraentes por causa de sua função. pode andar automaticamente sem qualquer controle. e vamos compartilhar todas as informações neste artigo. então, se você está pesquisando e quer fazer este projeto sozinho. apenas o que você precisa fazer é seguir todas as etapas fornecidas e ler o artigo completo com atenção. neste projeto, você aprenderá a interface do sensor ultrassônico com o Arduino e como montar o chassi e tudo. há mais coisa é a interface do motor o no conteúdo. Código e circuito que estamos compartilhando abaixo.
Existem vários tipos de obstáculos evitando o robô.
1. Com dois sensores ultrassônicos que têm mais precisão.
Neste robô usamos dois sensores ultrassônicos na frente do robô. e ambos funcionam simultaneamente. tem mais precisão do que o terceiro tipo. mas calibrar este robô é difícil e o posicionamento do sensor deve ser cuidadoso. porque a onda ultrassônica pode se sobrepor a cada sensor
2. Outro tipo é o pescoço rotativo com um sensor ultrassônico.
Neste tipo de carro para evitar obstáculos baseado em servo, há um servo motor colocado no chassi que gira com o movimento da roda. e há um sensor ultrassônico montado sobre o servo motor e verifique o obstáculo. se algum obstáculo passar pela frente do sensor o servo motor vai começar a girar e verificar onde está a maior distância e girar nessa direção.
3. este é um simples evitador de obstáculos
Isso é muito simples, há um sensor ultrassônico com detecção de obstáculos e movimento. e não há servo motor para rotação do sensor este é o obstáculo mais simples evitando o robô.
então, hoje estamos fazendo o primeiro. existem dois sensores na frente do robô. que funciona simultaneamente. estamos usando dois sensores porque dois sensores podem cobrir mais áreas. esta é a vantagem deste robô que pode cobrir mais área do que o outro tipo de robô. embora o robô de pescoço rotativo possa cobrir uma área semicircular perto do robô.
Como funciona o Obstáculo evitando o robô usando o Arduino?
há um nome de sensor sensor ultrassônico. que é o principal componente do robô. o sensor ultrassônico transmite a onda ultrassônica do TRIG e após o incidente, o alvo retorna ao sensor e é recebido pelo ECO. e o Arduino coletará os dados do sensor ultrassônico. e há alguma condição no código que deve ser implementada agora. e o Arduino enviará instruções de acordo com o código. em linguagem simples, se houver algum obstáculo que se aproxime do obstáculo evitando o carro, ele irá virar em qualquer direção, seja para a direita ou para a esquerda. depende de você qual direção o dominou.
O sensor ultrassônico mede a distância entre o sensor e o obstáculo. usamos a condição de que se a distância entre o sensor e o robô for menor que a distância de corte, o robô fará uma curva. é assim que funciona e neste robô de dois sensores os dois sensores funcionam da mesma forma.
Componentes necessários para o robô que evita obstáculos: –
- Arduino Uno
- 2 sensor ultrassônico
- 4 motor
- 4 rodas
- Chassis
- Fios de Ligação
- Bateria 12v
- Driver L298N
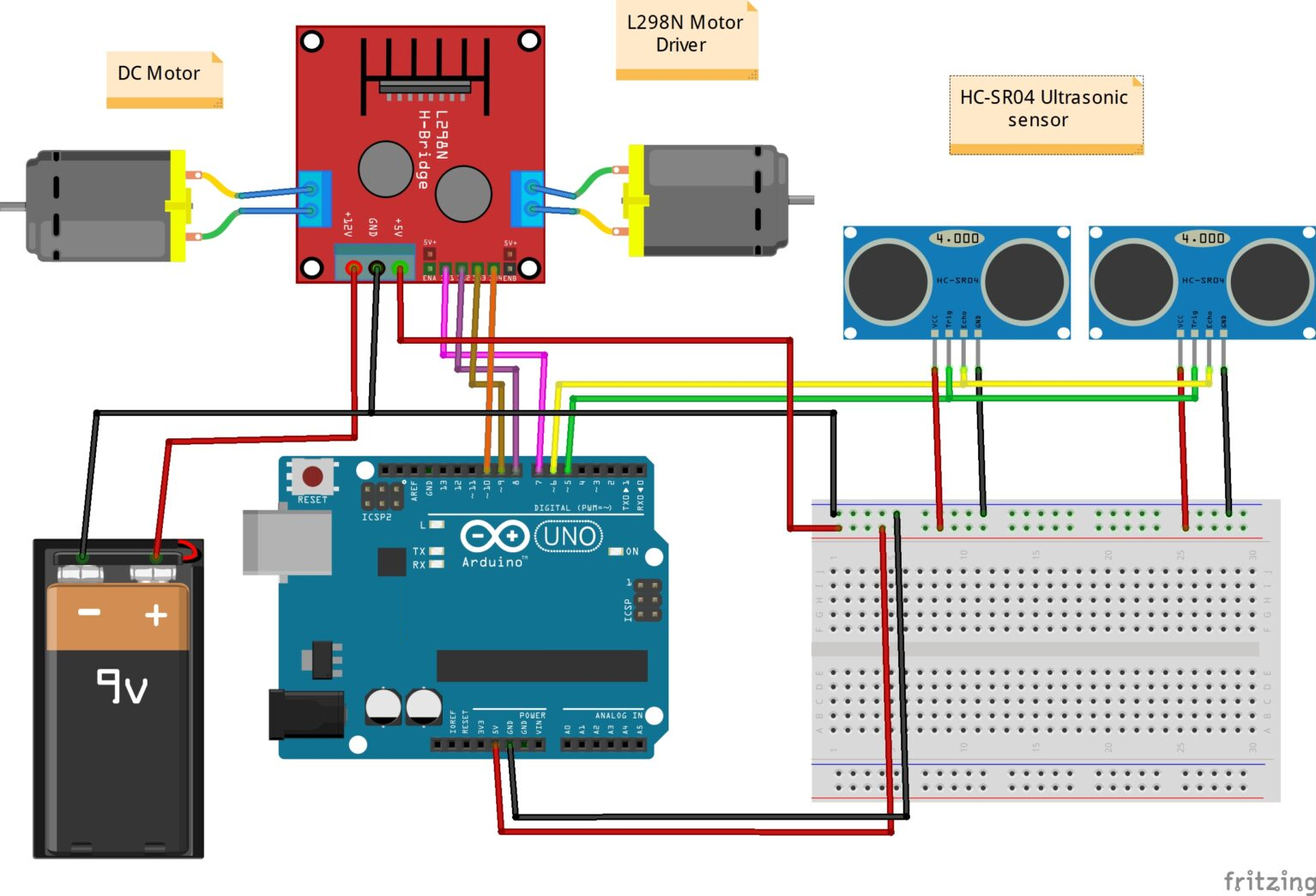
Robô evitando Obstáculo – Diagrama de circuito:
Robô evitando Obstáculo carro Código Arduino:
int duration=0;
long distance=0;
void setup() {
pinMode(1,OUTPUT);
pinMode(2,INPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(1, HIGH);
delayMicroseconds(10);
digitalWrite(1, LOW);
delayMicroseconds(2);
duration= pulseIn(2,HIGH);
distance=duration*0.034/2;
Serial.println(distance);
if(distance<=30)
{
digitalWrite(5, LOW);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
} else {
digitalWrite(5, HIGH);
digitalWrite(6, LOW);
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
}
}
// coloque seu código principal aqui, para executar repetidamenteFaça upload do código no Arduino com a ajuda do Arduino IDE. se você não está ciente do processo, pode ver o exemplo do nosso site nas categorias Guias do Arduino.






















")




{kind=link}