Análise de acelerômetro, giroscópio e magnetômetro com Raspberry Pi Parte I: leituras básicas
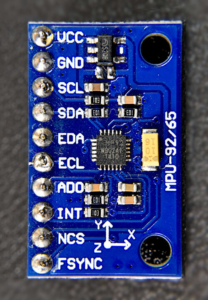
O MPU9250 é uma poderosa unidade de medição inercial (IMU) que consiste em três sensores primários: um acelerômetro, um giroscópio e um magnetômetro. Cada sensor mede um sinal de 3 eixos na referência cartesiana x, y, z. Cada um dos 9 graus de liberdade é convertido em um sinal digital de 16 bits, que pode ser lido em diferentes velocidades dependendo do sensor. O acelerômetro é capaz de medir ± 2, ± 4, ± 8 e ± 16g a uma taxa de amostra de 1 kHz, o giroscópio pode medir ± 250°/s, ± 500°/s, ± 1000°/s e ± 2000°/s (dps ou graus por segundo) a uma taxa de amostragem de 8 kHz, e o magnetômetro pode medir ± 4800μT a 100 Hz.
Um Raspberry Pi será usado para ler a aceleração de 3 eixos MPU9250, velocidade de rotação angular de 3 eixos e fluxo magnético de 3 eixos (a página do produto MPU9250 pode ser encontrada aqui). A saída e as limitações do MPU9250 serão exploradas, o que ajudará a definir as limitações de aplicações para cada sensor. Esta é apenas a primeira entrada na série MPU9250 IMU, onde, na extensão dos artigos, aplicaremos técnicas avançadas em Python para analisar cada um dos 9 eixos da IMU e desenvolver aplicativos do mundo real para o sensor, que podem ser útil para engenheiros interessados em análise de vibração, navegação, controle de veículos e muitas outras áreas.
Lista de peças e Ligação
Este tutorial usa dois componentes principais: Um MPU9250 9-DoF IMU e um computador Raspberry Pi. Qualquer Rapsberry Pi servirá, desde que tenha comunicação I2C e seja capaz de executar Python 3.x. Listei as peças e onde as comprei abaixo, junto com alguns outros componentes que podem tornar o acompanhamento do tutorial mais fácil:
- Raspberry Pi 4 Computador
- MPU9250 IMU
- Mini ProtoBoard
- Jumper Wires
- Kit Raspberry Pi 4 (cabos HDMI, cabos USB, etc.)
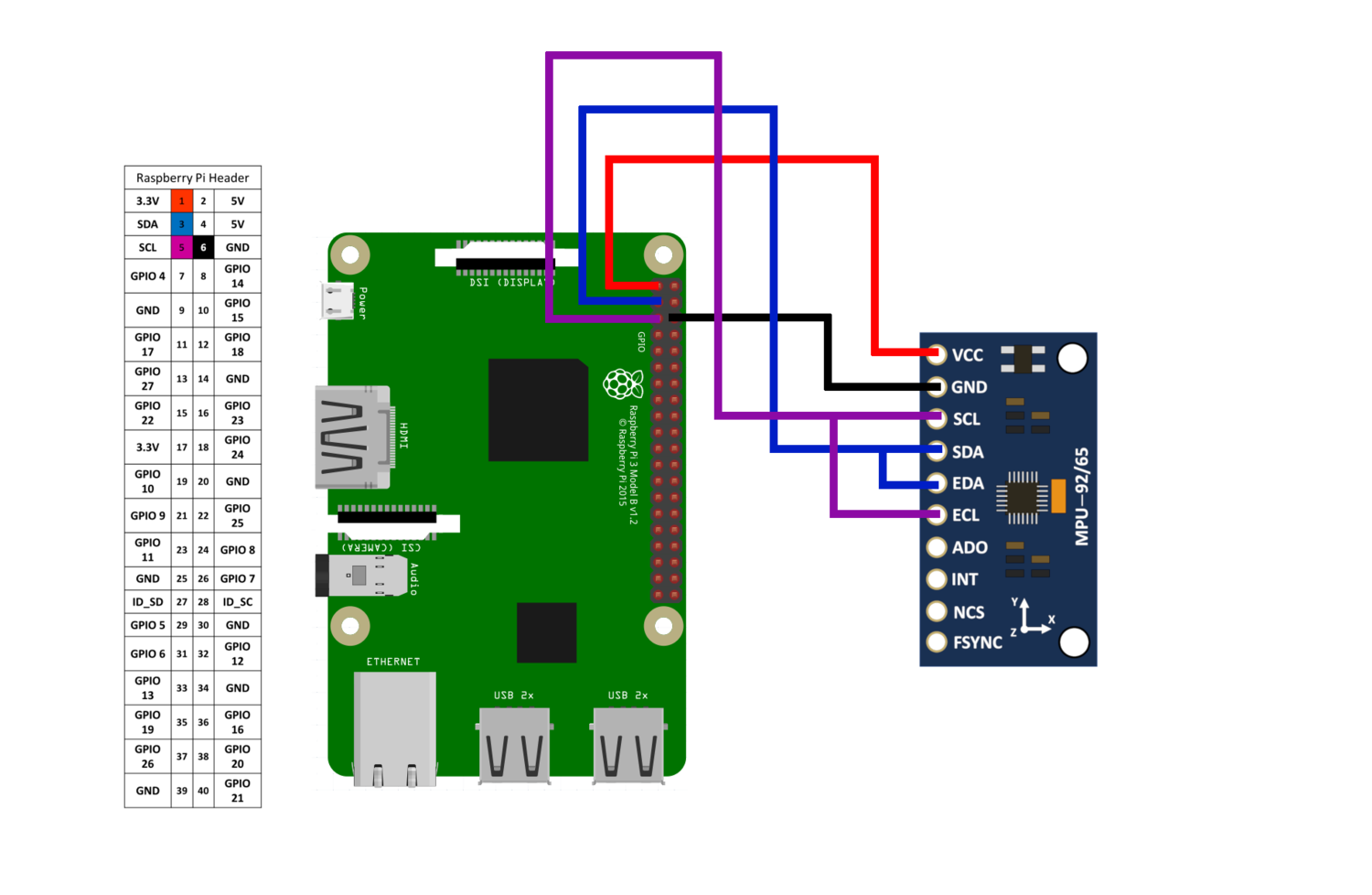
O diagrama de ligação para MPU9250 e Raspberry Pi é fornecido abaixo (e na tabela ao lado). Na verdade, estarei usando o Rapsberry Pi 4 (apesar do diagrama indicar que é um RPi 3), no entanto, a pinagem e os protocolos são todos iguais. Observe a segunda ligação I2C (EDA/ECL) – isso é importante porque conecta o MPU6050 (acelerômetro/giroscópio) e o AK8963 (magnetômetro) à porta I2C do RPi. Isso também significa que estaremos nos comunicando com dois dispositivos I2C (mais sobre isso mais tarde).
| Pino RPI | Pino MPU9250 |
|---|---|
| 3.3V (1) | VCC |
| GND (6) | GND |
| SDA (3) | SDA |
| SCL (5) | SCL |
| ECL → SCL | |
| EDA → SDA |
Raspberry Pi Porta I2C
O MPU9250 se comunicará com o Raspberry Pi usando o protocolo I2C. Para ler e gravar dados via I2C, devemos primeiro habilitar as portas I2C no RPi. A maneira como fazemos isso é usando a linha de comando ou navegando até Preferências → Configuração do Raspberry Pi. Adafruit tem um ótimo tutorial descrevendo este processo, mas uma versão resumida será fornecida abaixo usando capturas de tela da janela de configuração do RPi.
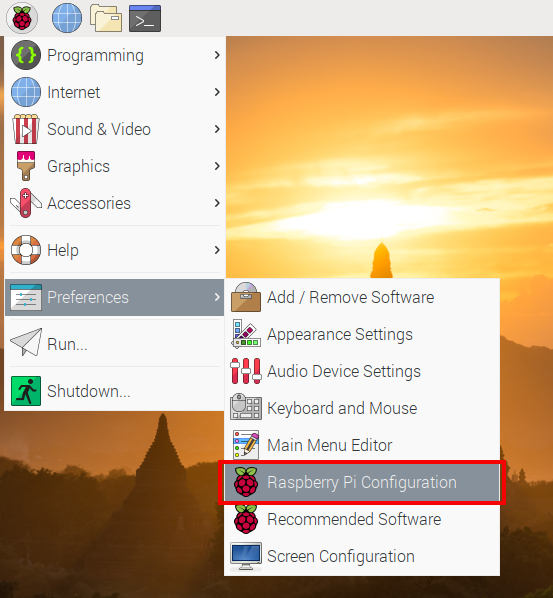 | 1. Preferências → Configuração do Raspberry Pi |
| 2. Interfaces → Habilitar I2C | 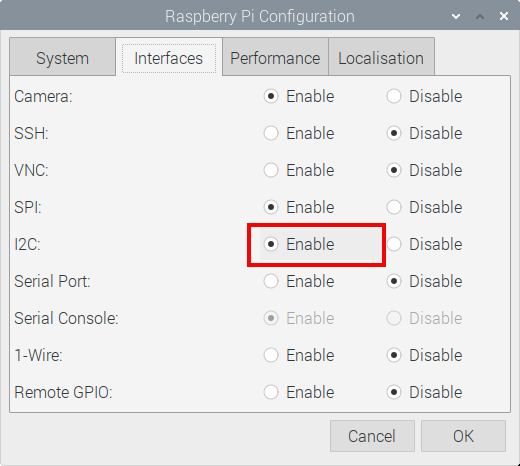 |
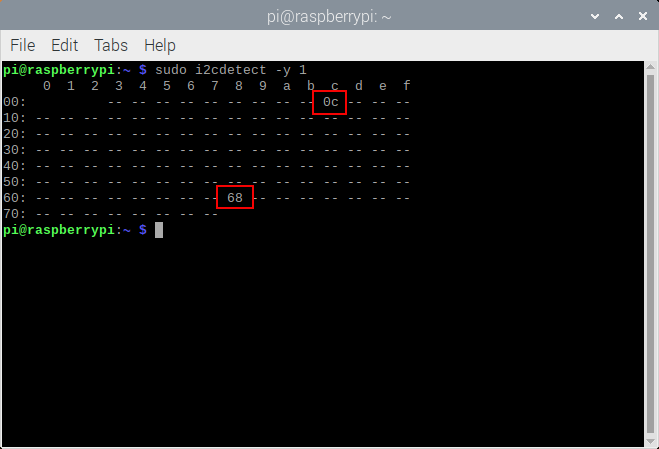 | 3. Abra a janela de comando e digite “sudo i2cdetect -y 1” |
Uma vez que ambos os dispositivos MPU9250 aparecem no detector I2C na janela de comando RPi, estamos prontos para ler o MPU6050 (endereço do dispositivo 0x68) e AK8963 (endereço do dispositivo 0x0C). O motivo pelo qual precisamos de ambos os endereços é que os conectamos à mesma porta I2C, portanto, agora usamos seus endereços para controlá-los em um programa. Neste tutorial, Python será usado. Os endereços dos dispositivos podem ser encontrados em suas respectivas planilhas de dados ou testando-os individualmente, conectando-os um a um. Sabemos que o MPU6050 (acelerador/giroscópio) é 0x68 em seu datasheet, e sabemos que o AK8963 (magnetômetro) é 0x0C em seu datasheet, então o teste de fiação não é necessário.
Se você vir apenas um endereço de dispositivo, verifique novamente a fiação; e se nenhum dispositivo estiver aparecendo também verifique a fiação e certifique-se de que há alimentação para o MPU9250 e também que o I2C foi habilitado no RPi! Daqui para frente, presume-se que o MPU9250 foi conectado ao RPi e que os endereços do dispositivo são idênticos aos fornecidos acima. Claro, podemos facilmente alterar os endereços do dispositivo no código Python, portanto, se o seu dispositivo, por algum motivo, tiver endereços diferentes, o usuário precisará alterá-los nos códigos a seguir.
Por último, precisaremos aumentar a velocidade da taxa de transmissão I2C para obter a resposta mais rápida do MPU9250, o que podemos fazer inserindo o seguinte na linha de comando:
| 1. sudo nano /boot/config.txt |  |
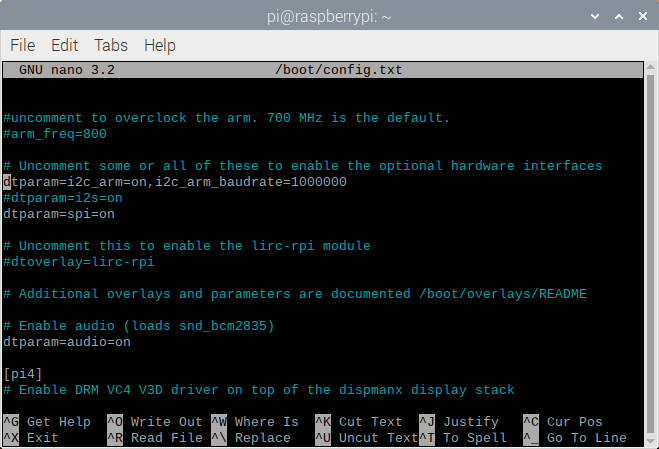 | 2. Adicionar linha ao lado da configuração I2C |
Tudo o que estamos fazendo aqui é definir a taxa de transmissão para 1 Mbps. Isso deve nos dar uma taxa de amostragem de cerca de 400 Hz – 500 Hz (após a conversão para unidades do mundo real). Podemos alcançar uma taxa de amostragem muito maior para o giroscópio e uma taxa de amostragem ligeiramente maior para o acelerômetro, mas isso não será explorado nesta série.

Interface do MPU9250 com Python
Em Python, a porta I2C pode ser acessada usando uma biblioteca particular chamada ‘smbus’. O smbus é inicializado usando a seguinte rotina simples:
import smbus bus = smbus.SMBus(1)
Usando o ‘barramento’ especificado no código acima, usaremos o documento Mapa de Registro MPU9250 para nos fornecer informações sobre como nos comunicar com o acelerômetro, giroscópio e magnetômetro (MPU6050 e AK8963). Os métodos de barramento I2C usados em Python estão fora do escopo deste tutorial, portanto, não serão descritos em grandes detalhes; portanto, o código usado para se comunicar para frente e para trás com o MPU6050 e AK8963 é fornecido abaixo sem muita descrição. Os detalhes completos e as capacidades de cada sensor são fornecidos na ficha técnica do MPU9250, onde muitas perguntas sobre os registros e valores correspondentes podem ser exploradas, se desejado.
# deve ser salvo na pasta local com o nome "mpu9250_i2c.py"
# será usado como controlador I2C e porto de função para o projeto
# consulte o datasheet e registre o mapa para obter uma explicação completa
import smbus,time
def MPU6050_start():
# alterar a taxa de amostragem (estabilidade)
samp_rate_div = 0 # sample rate = 8 kHz/(1+samp_rate_div)
bus.write_byte_data(MPU6050_ADDR, SMPLRT_DIV, samp_rate_div)
time.sleep(0.1)
# redefinir todos os sensores
bus.write_byte_data(MPU6050_ADDR,PWR_MGMT_1,0x00)
time.sleep(0.1)
# gerenciamento de energia e configurações de cristal
bus.write_byte_data(MPU6050_ADDR, PWR_MGMT_1, 0x01)
time.sleep(0.1)
#Write to Configuration register
bus.write_byte_data(MPU6050_ADDR, CONFIG, 0)
time.sleep(0.1)
#Escrever no registro de configuração do Gyro
gyro_config_sel = [0b00000,0b010000,0b10000,0b11000] # byte registers
gyro_config_vals = [250.0,500.0,1000.0,2000.0] # degrees/sec
gyro_indx = 0
bus.write_byte_data(MPU6050_ADDR, GYRO_CONFIG, int(gyro_config_sel[gyro_indx]))
time.sleep(0.1)
#Gravar no registro de configuração do Accel
accel_config_sel = [0b00000,0b01000,0b10000,0b11000] # byte registers
accel_config_vals = [2.0,4.0,8.0,16.0] # g (g = 9.81 m/s^2)
accel_indx = 0
bus.write_byte_data(MPU6050_ADDR, ACCEL_CONFIG, int(accel_config_sel[accel_indx]))
time.sleep(0.1)
# registro de interrupção (relacionado ao estouro de dados [FIFO])
bus.write_byte_data(MPU6050_ADDR, INT_ENABLE, 1)
time.sleep(0.1)
return gyro_config_vals[gyro_indx],accel_config_vals[accel_indx]
def read_raw_bits(register):
#ler valores de aceleração e giroscópio
high = bus.read_byte_data(MPU6050_ADDR, register)
low = bus.read_byte_data(MPU6050_ADDR, register+1)
# combinado alto e baixo para valor de bit sem sinal
value = ((high << 8) | low)
# converter para +- valor
if(value > 32768):
value -= 65536
return value
def mpu6050_conv():
#bits de aceleração brutos
acc_x = read_raw_bits(ACCEL_XOUT_H)
acc_y = read_raw_bits(ACCEL_YOUT_H)
acc_z = read_raw_bits(ACCEL_ZOUT_H)
# bits temporários brutos
## t_val = read_raw_bits(TEMP_OUT_H) # uncomment to read temp
#pedaços brutos de giroscópio
gyro_x = read_raw_bits(GYRO_XOUT_H)
gyro_y = read_raw_bits(GYRO_YOUT_H)
gyro_z = read_raw_bits(GYRO_ZOUT_H)
#converter para aceleração em ge giroscópio dps
a_x = (acc_x/(2.0**15.0))*accel_sens
a_y = (acc_y/(2.0**15.0))*accel_sens
a_z = (acc_z/(2.0**15.0))*accel_sens
w_x = (gyro_x/(2.0**15.0))*gyro_sens
w_y = (gyro_y/(2.0**15.0))*gyro_sens
w_z = (gyro_z/(2.0**15.0))*gyro_sens
## temp = ((t_val)/333.87)+21.0 # descomente e adicione abaixo em troca
return a_x,a_y,a_z,w_x,w_y,w_z
def AK8963_start():
bus.write_byte_data(AK8963_ADDR,AK8963_CNTL,0x00)
time.sleep(0.1)
AK8963_bit_res = 0b0001 # 0b0001 = 16-bit
AK8963_samp_rate = 0b0110 # 0b0010 = 8 Hz, 0b0110 = 100 Hz
AK8963_mode = (AK8963_bit_res <<4)+AK8963_samp_rate # bit conversion
bus.write_byte_data(AK8963_ADDR,AK8963_CNTL,AK8963_mode)
time.sleep(0.1)
def AK8963_reader(register):
# ler os valores do magnetômetro
low = bus.read_byte_data(AK8963_ADDR, register-1)
high = bus.read_byte_data(AK8963_ADDR, register)
# combinado alto e baixo para valor de bit sem sinal
value = ((high << 8) | low)
# converter para +- valor
if(value > 32768):
value -= 65536
return value
def AK8963_conv():
# bits de magnetômetro brutos
loop_count = 0
while 1:
mag_x = AK8963_reader(HXH)
mag_y = AK8963_reader(HYH)
mag_z = AK8963_reader(HZH)
# a próxima linha é necessária para AK8963
if bin(bus.read_byte_data(AK8963_ADDR,AK8963_ST2))=='0b10000':
break
loop_count+=1
#converter para aceleração em ge giroscópio dps
m_x = (mag_x/(2.0**15.0))*mag_sens
m_y = (mag_y/(2.0**15.0))*mag_sens
m_z = (mag_z/(2.0**15.0))*mag_sens
return m_x,m_y,m_z
# Registros MPU6050
MPU6050_ADDR = 0x68
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
ACCEL_CONFIG = 0x1C
INT_ENABLE = 0x38
ACCEL_XOUT_H = 0x3B
ACCEL_YOUT_H = 0x3D
ACCEL_ZOUT_H = 0x3F
TEMP_OUT_H = 0x41
GYRO_XOUT_H = 0x43
GYRO_YOUT_H = 0x45
GYRO_ZOUT_H = 0x47
#Registros AK8963
AK8963_ADDR = 0x0C
AK8963_ST1 = 0x02
HXH = 0x04
HYH = 0x06
HZH = 0x08
AK8963_ST2 = 0x09
AK8963_CNTL = 0x0A
mag_sens = 4900.0 # sensibilidade do magnetômetro: 4800 uT
# iniciar o driver I2C
bus = smbus.SMBus(1) # iniciar comunicação com ônibus i2c
gyro_sens,accel_sens = MPU6050_start() # instantiate gyro/accel
AK8963_start() # magnetômetro instanciarO bloco de código fornecido acima lida com a inicialização de cada sensor I2C (MPU6050 e AK8963) e também a conversão de bits para valores do mundo real (gravitação, graus por segundo e Teslas). O bloco de código deve ser salvo na pasta local com o nome ‘mpu6050_i2c.py’ – esta biblioteca será importada no exemplo abaixo. Tudo o que fazemos é chamar o script de conversão para cada sensor e temos as saídas de cada uma das nove variáveis. Simples!
O exemplo de código de uso é fornecido abaixo, junto com as leituras de amostra impressas no console Python:
# MPU6050 9-DoF Example Printout
from mpu9250_i2c import *
time.sleep(1) # delay necessary to allow mpu9250 to settle
print('recording data')
while 1:
try:
ax,ay,az,wx,wy,wz = mpu6050_conv() # read and convert mpu6050 data
mx,my,mz = AK8963_conv() # read and convert AK8963 magnetometer data
except:
continue
print('{}'.format('-'*30))
print('accel [g]: x = {0:2.2f}, y = {1:2.2f}, z {2:2.2f}= '.format(ax,ay,az))
print('gyro [dps]: x = {0:2.2f}, y = {1:2.2f}, z = {2:2.2f}'.format(wx,wy,wz))
print('mag [uT]: x = {0:2.2f}, y = {1:2.2f}, z = {2:2.2f}'.format(mx,my,mz))
print('{}'.format('-'*30))
time.sleep(1)| Impressão de exemplo de MPU9250 9-DoF | 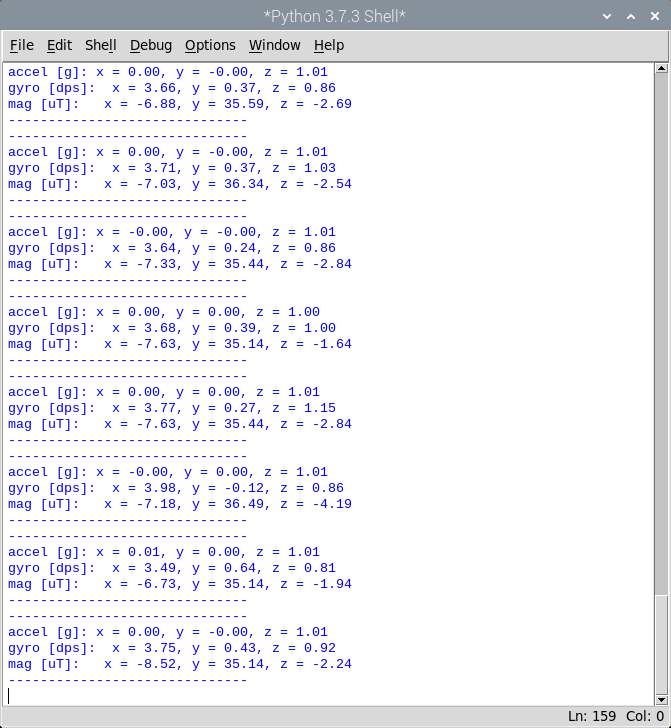 |
A impressão acima pode ser usada para verificar se o sensor e o código estão funcionando corretamente. O seguinte deve ser observado:
- Na direção z, temos um valor próximo a 1, o que significa que a gravidade está agindo na direção vertical e o positivo é para baixo
- O giroscópio está lendo valores próximos de 0 e, neste caso, não movemos o dispositivo, então eles devem estar próximos de 0
- O magnetômetro está mostrando valores entre -10μT-40μT nas direções x, y, que é aproximadamente a aproximação da força do campo magnético da Terra na cidade de Nova York (onde as medições foram feitas).
Com esses valores verificados, podemos afirmar que os sensores MPU9250 estão funcionando e podemos iniciar nossas investigações e alguns cálculos simples!
Visualizando aceleração, velocidade angular e intensidade do campo magnético
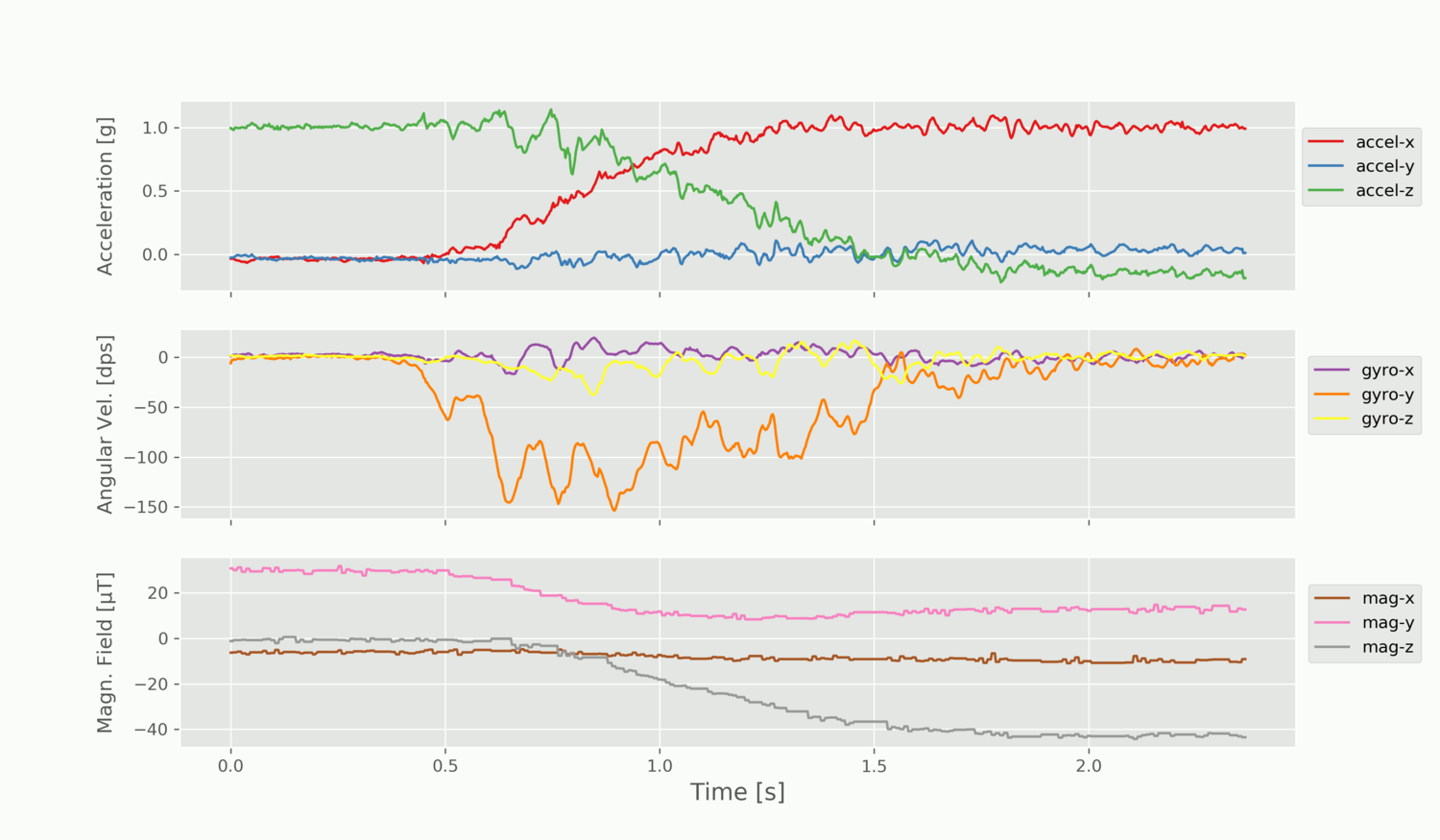
Agora que podemos verificar se cada sensor está retornando valores significativos, podemos prosseguir para investigar o sensor na prática. As impressões brutas mostradas na seção anterior podem ser plotadas em função do tempo:

O código para replicar o gráfico acima é fornecido abaixo:
# MPU9250 Código de visualização simples
# Para que isso seja executado, o arquivo mpu9250_i2c precisa
# esteja na pasta local
from mpu9250_i2c import *
import smbus,time,datetime
import numpy as np
import matplotlib.pyplot as plt
plt.style.use('ggplot') # matplotlib visual style setting
time.sleep(1) # wait for mpu9250 sensor to settle
ii = 1000 # number of points
t1 = time.time() # for calculating sample rate
# prepping for visualization
mpu6050_str = ['accel-x','accel-y','accel-z','gyro-x','gyro-y','gyro-z']
AK8963_str = ['mag-x','mag-y','mag-z']
mpu6050_vec,AK8963_vec,t_vec = [],[],[]
print('recording data')
for ii in range(0,ii):
try:
ax,ay,az,wx,wy,wz = mpu6050_conv() # read and convert mpu6050 data
mx,my,mz = AK8963_conv() # read and convert AK8963 magnetometer data
except:
continue
t_vec.append(time.time()) # capture timestamp
AK8963_vec.append([mx,my,mz])
mpu6050_vec.append([ax,ay,az,wx,wy,wz])
print('sample rate accel: {} Hz'.format(ii/(time.time()-t1))) # print the sample rate
t_vec = np.subtract(t_vec,t_vec[0])
# plot the resulting data in 3-subplots, with each data axis
fig,axs = plt.subplots(3,1,figsize=(12,7),sharex=True)
cmap = plt.cm.Set1
ax = axs[0] # plot accelerometer data
for zz in range(0,np.shape(mpu6050_vec)[1]-3):
data_vec = [ii[zz] for ii in mpu6050_vec]
ax.plot(t_vec,data_vec,label=mpu6050_str[zz],color=cmap(zz))
ax.legend(bbox_to_anchor=(1.12,0.9))
ax.set_ylabel('Acceleration [g]',fontsize=12)
ax2 = axs[1] # plot gyroscope data
for zz in range(3,np.shape(mpu6050_vec)[1]):
data_vec = [ii[zz] for ii in mpu6050_vec]
ax2.plot(t_vec,data_vec,label=mpu6050_str[zz],color=cmap(zz))
ax2.legend(bbox_to_anchor=(1.12,0.9))
ax2.set_ylabel('Angular Vel. [dps]',fontsize=12)
ax3 = axs[2] # plot magnetometer data
for zz in range(0,np.shape(AK8963_vec)[1]):
data_vec = [ii[zz] for ii in AK8963_vec]
ax3.plot(t_vec,data_vec,label=AK8963_str[zz],color=cmap(zz+6))
ax3.legend(bbox_to_anchor=(1.12,0.9))
ax3.set_ylabel('Magn. Field [μT]',fontsize=12)
ax3.set_xlabel('Time [s]',fontsize=14)
fig.align_ylabels(axs)
plt.show()Também podemos começar a explorar os sensores girando o dispositivo. Por exemplo, se virarmos o sensor de lado de modo que a direção x esteja apontada para cima, podemos visualizar como cada um dos 9 graus de liberdade responde:
Uma visualização GIF 3D em tempo real é mostrada abaixo, onde cada eixo pode ser rastreado. É uma ótima ferramenta de visualização para entender como cada eixo se comporta sob rotações específicas:
Algumas observações podem ser feitas sobre o comportamento do gráfico acima:
- A rotação em torno do eixo y resulta na aceleração gravitacional na direção x
- A rotação mostra uma velocidade angular negativa na direção y
- O campo magnético muda das direções x e y para as direções y e z
Nos próximos tutoriais, explorarei o acelerômetro, o giroscópio e o magnetômetro individualmente, bem como a fusão de todos os três para criar relacionamentos significativos com a engenharia do mundo real.
Conclusão e Continuação
 Este tutorial apresentou o acelerômetro, giroscópio e magnetômetro MPU9250 e como usar o computador Raspberry Pi para se comunicar com o dispositivo. Usando o protocolo I2C, pudemos ler 9 variáveis diferentes, uma para cada um dos três eixos cartesianos de cada um dos três sensores. Em seguida, cada uma das 9 variáveis foi visualizada e plotada para um determinado movimento. No exemplo específico usado acima, demonstrei o comportamento de cada sensor sob uma determinada rotação do eixo, onde aprendemos como cada sensor respondeu. As magnitudes de cada sensor são importantes e fornecem informações sobre aplicações do mundo real e, nos próximos tutoriais, o acelerômetro, giroscópio e magnetômetro serão explorados individualmente em grandes extensões, a fim de fornecer um sistema de fusão de sensores totalmente funcional capaz de reproduzir movimentos físicos e traduções no espaço tridimensional.
Este tutorial apresentou o acelerômetro, giroscópio e magnetômetro MPU9250 e como usar o computador Raspberry Pi para se comunicar com o dispositivo. Usando o protocolo I2C, pudemos ler 9 variáveis diferentes, uma para cada um dos três eixos cartesianos de cada um dos três sensores. Em seguida, cada uma das 9 variáveis foi visualizada e plotada para um determinado movimento. No exemplo específico usado acima, demonstrei o comportamento de cada sensor sob uma determinada rotação do eixo, onde aprendemos como cada sensor respondeu. As magnitudes de cada sensor são importantes e fornecem informações sobre aplicações do mundo real e, nos próximos tutoriais, o acelerômetro, giroscópio e magnetômetro serão explorados individualmente em grandes extensões, a fim de fornecer um sistema de fusão de sensores totalmente funcional capaz de reproduzir movimentos físicos e traduções no espaço tridimensional.















")








{kind=link}
Como faço para capturar os dados do acelerômetro e passar simultaneamente para uma planilha no Excel sendo que os dados tem que ser passado em milissegundos?
Dentro do Raspbery não sei como, pois só vi uma com o ESP32 a tempos.