Robô evitando Obstáculo usando Arduino
Conteudo
Robô evitando Obstáculo usando Arduino
Como fazer um robô para evitar obstáculos usando o Arduino.
Bem vindos ao pessoal neste projeto, faremos um Robô evitando Obstáculo usando Arduino e kit. você sabe sobre o obstáculo evitando o robô? bem, vou explicar a você o que faz e como funciona. basicamente, é um robô que anda automaticamente com a ajuda do sensor ultrassônico. um sensor ultrassônico é usado em muitos outros projetos, como robôs inteligentes. obstáculo evitando robô, também conhecido como robô autônomo. Que toma a decisão de si mesmo. se houver algo na frente do robô, ele mudará seu caminho como um humano. então, está em algum lugar inteligente. é o projeto mais popular da atualidade e procurado pela maioria dos alunos atualmente. e todo mundo gosta desse robô. neste projeto, você também aprenderá muitas coisas, por exemplo, como usar o sensor ultrassônico e usando o monitor serial também, discutiremos o código também.
Como funciona?
Em Robô evitando Obstáculo, há um sensor que é conhecido como sensor ultrassônico. que têm a capacidade de medir a distância na frente do sensor, no parágrafo abaixo saberemos como funciona o sensor, neste robô evitando o obstáculo usando o Arduino Uno, ele funciona como um medidor de distância.
Um sensor ultrassônico com duas partes, uma é o transmissor e a outra é o receptor, conhecido como gatilho e ecos. o gatilho é a parte transmissora e transmite a onda ultrassônica. outra parte que é o receptor de um eco recebe as ondas ultrassônicas do transmissor transmitidas do gatilho. agora calculamos em quanto tempo as ondas ultrassônicas retornam ao receptor e divididas por 2 porque a viagem no tempo é o dobro.

calculamos a distância pela fórmula de tempo e velocidade
distância = tempo X velocidade
da onda ultrassônica = 340 m/s
Componentes necessários para robô ao evitar obstáculos
- Arduino NANO ou Uno (qualqer versão)
- Sensor Ultrassônico HC-SR04
- Módulo Motor LM298N Motor
- Motores 5V DC
- Bateria
- Rodas
- Chassis
- Fios de Jumper
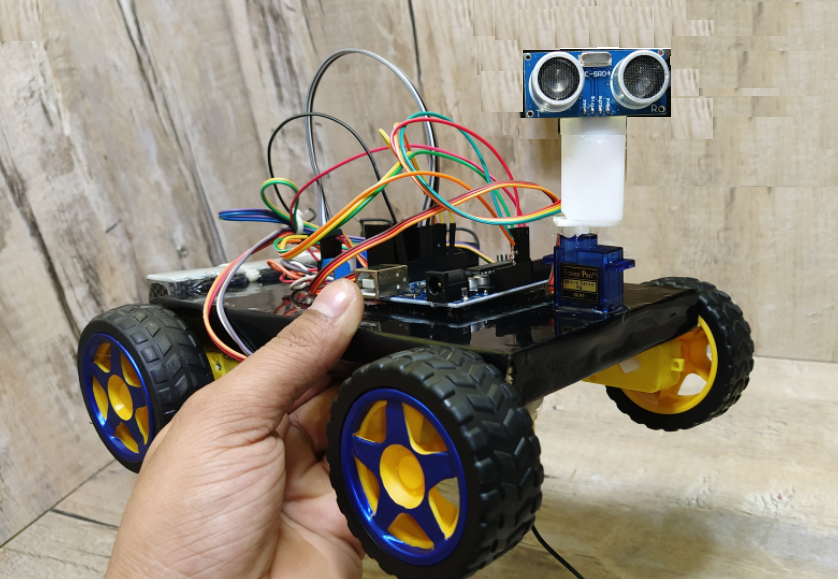
este é um robô especial evitando obstáculo com pescoço para detectar a distância aqui e ali também. o sensor ultrassônico é conectado ao servo que gira se houver algum obstáculo no caminho do robô como um ser humano. quando cruzamos a estrada. o robô anda reto e se encontrar algum obstáculo no caminho gira o pescoço e compara a distância da direita e da esquerda então de acordo com a distância que toma a decisão. por exemplo, ele detecta qualquer obstáculo no caminho, então ele irá parar e verificar à direita e à esquerda onde está a distância máxima. então ele vai virar para a direita ou esquerda de acordo com a distância máxima.
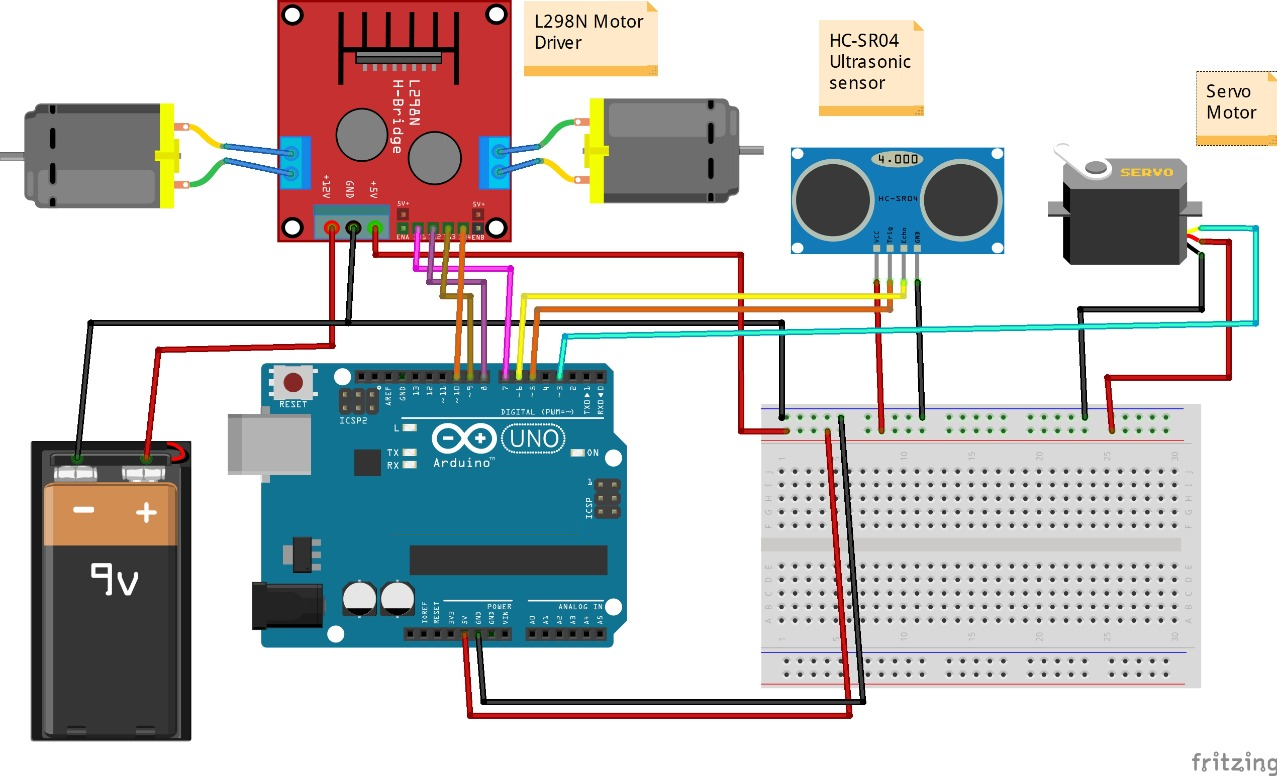
Diagrama de circuito do carro para evitar obstáculos Arduino

Código do Arduino para o robô evitando obstáculo:
int duration=0;
long distance=0;
int firstduration=0;
long firstdistance=0;
int secondduration=0;
long seconddistance=0;
#include "servo.h"
Servo myservo;
int pos = 0;
void setup() {
pinMode(5,OUTPUT);
pinMode(6,INPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
myservo.attach(3);
Serial.begin(9600);
}
void loop() {
digitalWrite(5, HIGH);
delayMicroseconds(10);
digitalWrite(5, LOW);
delayMicroseconds(2);
duration= pulseIn(6,HIGH);
delay(100);
distance=duration*0.034/2;
Serial.println(distance);
if(distance<=20) {
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
delay(300);
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);
delay(350);
digitalWrite(7, LOW);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
myservo.write(0);
delay(500);
digitalWrite(5, HIGH);
delayMicroseconds(10);
digitalWrite(5, LOW);
delayMicroseconds(2);
firstduration=pulseIn(6,HIGH);
delay(100);
firstdistance=firstduration*0.034/2;
int first = firstdistance;
Serial.println(firstdistance);
myservo.write(90);
delay(500);
myservo.write(180);
delay(500);
digitalWrite(5, HIGH);
delayMicroseconds(10);
digitalWrite(5, LOW);
delayMicroseconds(2);
secondduration= pulseIn(6,HIGH);
delay(100);
seconddistance=secondduration*0.034/2;
int second = seconddistance;
Serial.println(seconddistance);
myservo.write(90);
delay(500);
if(first < second ) {
digitalWrite(7, LOW);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
delay(500);
} else if(first > second ) {
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, HIGH);
delay(500);
}
} else {
digitalWrite(7, HIGH);
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
digitalWrite(10, LOW);
}
}





























{kind=link}