Interface do sensor de proximidade para evitar obstáculos por infravermelho E18-D80NK com o Arduino
Um sensor infravermelho é um módulo eletrônico usado para detectar a aparência física de seus arredores, tanto pela emissão e/ou detecção de radiação infravermelha. Os sensores infravermelhos também podem detectar movimento e determinar a quantidade de calor liberada por um objeto. Esses sensores são comumente usados em alarmes de intrusão, interruptores de luz e outras aplicações de automação residencial e automação industrial. Anteriormente, usamos sensores IR em muitos projetos. Mas esses sensores IR não podem ser colocados na luz do sol, pois o sol também libera ondas IR Existe apenas uma solução comum para este problema: Module seu sinal IR para que seu sensor possa detectar uma variação IR em vez de um nível IR fixo.
Neste tutorial, faremos a interface do sensor de proximidade IR E18-D80NK com o Arduino. O E18-D80NK é um sensor de proximidade infravermelho avançado de baixo custo com uma faixa de detecção de obstáculos de 3 cm a 80 cm. O uso de sinal IR modulado protege o sensor das interferências causadas pela luz normal de uma lâmpada ou da luz solar.
Conteudo
Componentes necessários para interface E18-D80NK
- Arduino Uno
- Sensor IR E18-D80NK
- Jumper Wired
- ProtoBoard
E18-D80NK Sensor de proximidade para prevenção de obstáculos IR
O sensor infravermelho de prevenção de obstáculos E18-D80NK é um sensor de proximidade infravermelho de baixo custo com uma faixa ajustável de 3 cm a 80 cm. O sensor E18-D80 vem com Transmissor IR e receptor IR em um módulo. O transmissor IR transmite o sinal IR modulado, que é então refletido pelo objeto em seu caminho e então detectado pelo receptor. Este sensor tem menos interferência da luz solar por causa da luz IV modulada.

O sensor IR E18-D80 é amplamente utilizado em robôs para evitar obstáculos, linhas de montagem industriais, estacionamento reverso de carros e muitas outras aplicações de automação. A faixa de detecção pode ser ajustada de acordo com a aplicação usando o parafuso multi-voltas localizado na parte traseira do sensor. A saída do sinal de comutação muda de acordo com a detecção de obstáculo. Ele permanece alto quando não há obstáculos e muda para baixo quando há obstáculos. Um LED vermelho é colocado atrás da sonda e fica alto sempre que um obstáculo é detectado. O sensor E18 opera em 5 V e consome cerca de 5mA a 30mA de corrente sem nenhuma carga.

Especificações e recursos do sensor de proximidade IR E18-D80NK:
- Tensão de entrada: 5 V DC
- Consumo de corrente:> 25mA (min) ~ 100mA (max)
- Dimensão: 1,7 cm (diâmetro) x 4,5 cm (comprimento)
- Comprimento do cabo: 45cm
- Detecção de objetos: Transparente ou Opaco
- Tipo reflexivo difuso
- Alcance de detecção: 3cm a 80cm (depende da superfície do obstáculo)
- Saída NPN (normalmente alta)
- Temperatura ambiente: -25 ° C ~ 55 °
Diagrama de circuito para interface do sensor E18-D80NK com Arduino
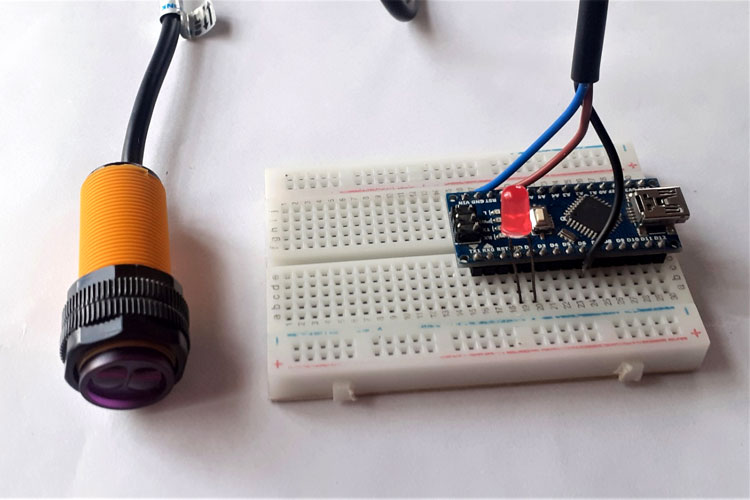
O esquema completo para a interface do sensor de proximidade E18-D80NK com o Arduino é fornecido abaixo:

A conexão para interface do sensor E18-D80NK IR com Arduino é muito fácil, conecte o fio marrom do sensor com o pino 5V do Arduino, conecte o fio azul do sensor com o aterramento do Arduino e conecte o pino preto de um sensor com um pino digital 7 do Arduino Nano.

Os sensores IR também são usados em robôs seguidores de linha e sistema de alarme.
Programando Arduino para sensor de infravermelho E18-D80NK
O código para fazer a interface do sensor de infravermelho E18-D80NK com o Arduino é o mais simples possível. O código Arduino completo do sensor IR é fornecido no final do documento. A explicação do código é a seguinte:
Inicie o código definindo todos os pinos necessários para ler os dados do sensor e controlar o LED.
const int e18_sensor = 7; const int led = 6;
Então, dentro da função setup(), inicialize o monitor serial em 9600 para fins de depuração. Além disso, defina o pino do sensor como entrada e o pino do LED como saída.
void setup() {
Serial.begin(9600);
pinMode (e18_sensor, INPUT);
pinMode (led, INPUT);
}Então, dentro da função loop(), leia o pino do sensor usando digitalRead() e se o estado do pino estiver BAIXO, acenda o LED, caso contrário, desligue o LED.
void loop() {
int state = digitalRead(e18_sensor);
Serial.println(state);
if(state==LOW){
Serial.println("Objeto detectado");
digitalWrite(led, HIGH);
}
else {
Serial.println("Tudo limpo");
digitalWrite(led, LOW);
}
Testando o Sensor IR E18-D80NK
Quando o código e o hardware estiverem prontos, conecte o Arduino ao laptop e faça upload do código. Depois disso, abra o monitor serial a uma taxa de transmissão de 9600 e faça algum movimento na frente do sensor. Observe o LED e o monitor serial.


O código para fazer a interface do sensor de proximidade com o Arduino são fornecidos abaixo. Espero que você tenha gostado do tutorial e aprendido algo útil. Se você tiver alguma dúvida, deixe-a na seção de comentários ou use nossos fóruns para outras questões técnicas.
Código
const int e18_sensor = 7;
const int led = 2;
void setup() {
Serial.begin(9600);
pinMode (e18_sensor, INPUT);
pinMode (led, INPUT);
}
void loop() {
int state = digitalRead(e18_sensor);
Serial.println(state);
if(state==LOW){
Serial.println("Object Detected");
digitalWrite(led, HIGH);
}
else {
Serial.println("All Clear");
digitalWrite(led, LOW);
}
delay(1000);
}













{kind=link}