Roll, Pitch e Yaw com MPU6050 – Arduino
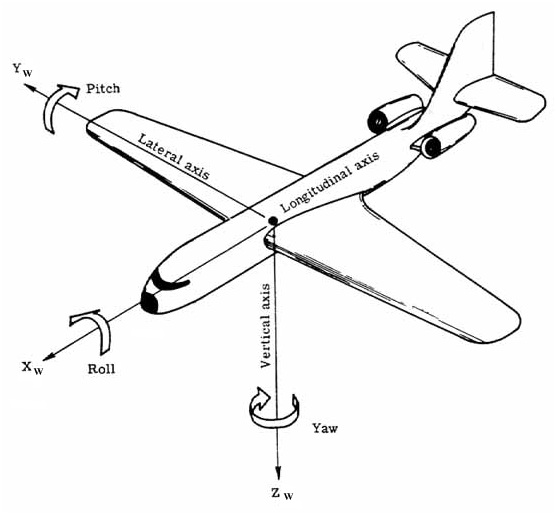
Um corpo pode girar no espaço ao longo de 3 eixos, referindo-se à dinâmica aplicada a aeronaves, falamos mais propriamente de roll (Roll), pitch (Pitch) e yaw (Yaw). Neste novo artigo sobre o acelerômetro/giroscópio MPU6050 irei falar sobre como é possível obter esses ângulos (Roll, Pitch e Yaw) usando o Arduino com uma fórmula simples.

Com um acelerômetro, os ângulos de rotação e inclinação podem ser determinados usando as seguintes fórmulas:

Ângulo de inclinação

Ângulo de rotação
Já para determinar o ângulo de guinada (Yaw) será necessário usar o giroscópio. O giroscópio é útil para medir a velocidade angular dos três eixos em graus/seg. Ao adquirir diferentes valores da velocidade angular do eixo Z do giroscópio para cada período de 1 segundo, será possível obter os graus de rotação em torno do eixo Z. O código utilizado para este fim é mostrado a seguir .
if (GyroAsseZ > 1 || GyroAsseZ < -1) {
GyroAsseZ /= 1000;
yaw += GyroAsseZ;
}
delay(1);Conteudo
Lista de materiais:
Arduino UNO (ou outro, veja a nota abaixo)
Módulo GY-521
ProtoBoard

| MPU6050 | ARDUINO |
| VCC | +3.3V |
| GND | GND |
| SDA | A4 |
| SCL | A5 |
Para maiores esclarecimentos sobre as conexões a serem feitas, recomendo que você leia meu artigo sobre a IMU MPU6050.
Recentemente descobri uma biblioteca muito útil que pode facilitar (e não um pouco) o uso do MPU6050 para os menos experientes.
Em seguida, o sketch (sem o uso de bibliotecas externas) a ser carregado no Arduino, neste caso apenas os ângulos de Roll e Pitch serão calculados.
Desenhe sem usar a biblioteca
// Roll e Pitch com MPU6050
#include <SPI.h>
#include <Wire.h>
#define MPU 0x68 //Endereço I2C do MPU-6050
double AcX, AcY, AcZ;
int Pitch, Roll;
void setup() {
Serial.begin(9600);
init_MPU(); //Inicialização MPU6050
}
void loop() {
FunctionsMPU(); // Eu adquiro eixos AcX, AcY, AcZ.
Roll = FunctionsPitchRoll(AcX, AcY, AcZ); //Cálculo do ângulo de rotação
Pitch = FunctionsPitchRoll(AcY, AcX, AcZ); //Cálculo do ângulo de inclinação
Serial.print("Pitch: "); Serial.print(Pitch);
Serial.print("\t");
Serial.print("Roll: "); Serial.print(Roll);
Serial.print("\n");
}
void init_MPU() {
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // definido como zero (ativa o MPU-6050)
Wire.endTransmission(true);
delay(1000);
}
// Função para calcular os ângulos de inclinação e rotação
double FunctionsPitchRoll(double A, double B, double C) {
double DatoA, DatoB, Value;
DatoA = A;
DatoB = (B * B) + (C * C);
DatoB = sqrt(DatoB);
Value = atan2(DatoA, DatoB);
Value = Value * 180 / 3.14;
return (int)Value;
}
// Função para aquisição dos eixos X, Y, Z do MPU6050
void FunctionsMPU() {
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 6, true); // request a total of 14 registers
AcX = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
}Ao abrir o Arduino Serial Monitor é possível consultar os ângulos de Roll e Pitch.
Já os interessados em usar o MPU6050 por meio de uma biblioteca, terão que baixar a biblioteca aqui e inseri-la em /Documents/Arduino/libraries/ … e fazer o upload do seguinte sketch.
Sketch com o uso da biblioteca
// Roll, Pitch e Yaw com MPU6050
#include <Wire.h>
#include <MPU6050.h>
MPU6050 mpu;
// Valores de pitch, roll e yaw
int pitch = 0;
int roll = 0;
float yaw = 0;
void setup() {
Serial.begin(115200);
Serial.println("Initialize MPU6050");
while (!mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_2G)) {
Serial.println("Não foi possível encontrar um sensor MPU6050 válido, verifique a ligação!");
delay(500);
}
// Calibrar o giroscópio. A calibração deve estar em repouso.
// Se você não quiser calibrar, comente esta linha.
mpu.calibrateGyro();
// Defina a sensibilidade do limite. Padrão 3.
// Se você não quiser usar o limite, comente esta linha ou defina 0.
mpu.setThreshold(1);
// Verifique as configurações
checkSettings();
}
void loop() {
// Lê valores normalizados
Vector normAccel = mpu.readNormalizeAccel();
Vector normGyro = mpu.readNormalizeGyro();
// Calcular Pitch & Roll
pitch = -(atan2(normAccel.XAxis, sqrt(normAccel.YAxis * normAccel.YAxis + normAccel.ZAxis * normAccel.ZAxis)) * 180.0) / M_PI;
roll = (atan2(normAccel.YAxis, normAccel.ZAxis) * 180.0) / M_PI;
// Ignore o giroscópio se nossa velocidade angular não atingir nosso limite
if (normGyro.ZAxis > 1 || normGyro.ZAxis < -1) {
normGyro.ZAxis /= 100;
yaw += normGyro.ZAxis;
}
// Mantenha nosso ângulo entre 0-359 graus
if (yaw < 0)
yaw += 360;
else if (yaw > 359)
yaw -= 360;
// Output
Serial.print("Pitch = ");
Serial.print(pitch);
Serial.print("\tRoll = ");
Serial.print(roll);
Serial.print("\tYaw = ");
Serial.print(yaw);
Serial.println();
delay(10);
}
void checkSettings() {
Serial.println();
Serial.print(" * Sleep Mode: ");
Serial.println(mpu.getSleepEnabled() ? "Enabled" : "Disabled");
Serial.print(" * Clock Source: ");
switch (mpu.getClockSource()) {
case MPU6050_CLOCK_KEEP_RESET: Serial.println("Para o relógio e mantém o gerador de cronometragem reiniciado"); break;
case MPU6050_CLOCK_EXTERNAL_19MHZ: Serial.println("PLL with external 19.2MHz reference"); break;
case MPU6050_CLOCK_EXTERNAL_32KHZ: Serial.println("PLL with external 32.768kHz reference"); break;
case MPU6050_CLOCK_PLL_ZGYRO: Serial.println("PLL with Z axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_YGYRO: Serial.println("PLL with Y axis gyroscope reference"); break;
case MPU6050_CLOCK_PLL_XGYRO: Serial.println("PLL with X axis gyroscope reference"); break;
case MPU6050_CLOCK_INTERNAL_8MHZ: Serial.println("Internal 8MHz oscillator"); break;
}
Serial.print(" * Gyroscope: ");
switch (mpu.getScale()) {
case MPU6050_SCALE_2000DPS: Serial.println("2000 dps"); break;
case MPU6050_SCALE_1000DPS: Serial.println("1000 dps"); break;
case MPU6050_SCALE_500DPS: Serial.println("500 dps"); break;
case MPU6050_SCALE_250DPS: Serial.println("250 dps"); break;
}
Serial.print(" * Gyroscope offsets: ");
Serial.print(mpu.getGyroOffsetX());
Serial.print(" / ");
Serial.print(mpu.getGyroOffsetY());
Serial.print(" / ");
Serial.println(mpu.getGyroOffsetZ());
Serial.println();
}Como pode ser visto na linha 20, é possível definir a escala total do DPS e a sensibilidade em G.
Para definir a escala total no DPS, basta substituir MPU6050_SCALE_2000DPS por:
- MPU6050_SCALE_2000DPS
- MPU6050_SCALE_1000DPS
- MPU6050_SCALE_500DPS
- MPU6050_SCALE_250DPS
Quanto à faixa de sensibilidade, MPU6050_RANGE_2G deve ser substituído por:
- MPU6050_RANGE_2G
- MPU6050_RANGE_4G
- MPU6050_RANGE_8G
- MPU6050_RANGE_16G
NB: Eu dividi o valor do eixo z do giroscópio por 100 (e não por 1000), pois adicionei um atraso de 10 ms, portanto 1000/10 = 100.
Abrindo o monitor serial você deve ver os três cantos. É tudo por agora.
Se você tiver alguma dúvida, não hesite em deixar um comentário. Olá a todos, até breve!













{kind=link}